
7 - Linear Transformations
Linear transformations are defined as functions between vector spaces which preserve addition and multiplication. This is sufficient to insure that th ey preserve additional aspects of the spaces as well as the result below shows. Theorem Suppose that T: V 6 W is a linear transformation and denote the zeros of V and W by 0v and 0w, respectively.
Download 7 - Linear Transformations

Information
Domain:
Source:
Link to this page:
Documents from same domain

MA214 Fall 2008 Practice Test #2 - University of …
www.ms.uky.edu11. Find the unique solution to the initial value problem y00 +4y = 3sin2t, with y(0) = 2 and y0(0) = −1. 12. Consider a driven, undamped harmonic oscillator …

hypothesis conclusion - Mathematics
www.ms.uky.eduTen Tips for Writing Mathematical Proofs Katharine Ott 1. Determine exactly what information you are given (also called the hypothesis)andwhat …

Example of MLE Computations, using R - …
www.ms.uky.eduExample of MLE Computations, using R First of all, do you really need R to compute the MLE? Please note that MLE in many cases have explicit formula.

Galois Theory of Power Series Rings in Characteristic p
www.ms.uky.eduGALOIS THEORY OF POWER SERIES RINGS IN CHARACTERISTIC p.* By TZOUNG TSIENG MOH. Introduction. 0. 1. Let kc be an algebraically closed field of clharac-

Student Quick Start Guide - University of Kentucky
www.ms.uky.edustudent_guide/ Revised August 2016 STUDENT QUICK START GUIDE This Quick Start Guide provides information to help you start using WebAssign. ENROLL Either your instructor enrolled you in a class and created a WebAssign account for you, or she gave you a …

A (gentle) Introduction to Sturm-Liouville
www.ms.uky.eduIntroduction The Non-Singular Problem The Singular Problem References A (gentle) Introduction to Sturm-Liouville Problems Ryan Walker March 10, 2010

DIFFERENTIAL EQUATIONS - Mathematics
www.ms.uky.eduequations. Systems of Differential Equations – Here we will look at some of the basics of systems of differential equations. Solutions to Systems – We will take a look at what is involved in solving a system of differential equations. Phase Plane – A brief introduction to the phase plane and phase portraits. Real Eigenvalues – Solving ...

College Algebra - Mathematics
www.ms.uky.educollege algebra textbooks. In our view, the core material for the (non-remedial) courses defined by these tomes is but a shadow of that traditionally covered material in a reasonable high school program. Moreover, much of the material is substantially repeated from earlier study and it proceeds at a slow pace with extensive practice and

Newton’s Approximation of Pi
www.ms.uky.eduThe History of Pi • Archimedes’ classical method – Using Polygons with inscribed And Circumscribed circles – Found Pi between 223/71 and 22/7 ... side polygon 262 230 • 1630 AD – Grienberger – Pi to 39 decimal places ... – Pi to 2 million and 38 decimal places in 137.30 hours on a FACOM M-200 computer
College Algebra - University of Kentucky
www.ms.uky.eduCollege Algebra by Avinash Sathaye, Professor of Mathematics 1 Department of Mathematics, University of Kentucky Aryabhat¯ .a This book may be freely downloaded for personal use from the author’s web site
Related documents

Lie Groups for 2D and 3D Transformations - Ethan Eade
ethaneade.comMay 20, 2017 · Lie Groups for 2D and 3D Transformations Ethan Eade Updated May 20, 2017 * 1 Introduction This document derives useful formulae for working with the Lie groups that represent transformations in 2D and 3D space. A Lie group is a topological group that is also a smooth manifold, with some other nice properties.

COORDINATE TRANSFORMATIONS IN SURVEYING
mygeodesy.id.auIn 2D transformations all points lie in a plane. In these notes it is assumed that 2D transformations are transformations from one rectangular coordinate system (u,v) to another rectangular system (x,y). In addition, unless stated otherwise, a rotation is an angle considered to be positive in an
Geometric Transformations: Warping, Registration, …
eeweb.engineering.nyu.eduT(N+1,1:N).T has both forward and inverse transformations. N=2 for 2D image transformation2D image transformation 0 In MATLABnotation b 1 0 1 0 0 0 2 2 1 1 T T a b a b a T b A Geometric TransformationGeometric Transformation EL512 Image ProcessingEL512 Image Processing 15 15

Affine Transformations - Clemson University
people.cs.clemson.eduC.2 AFFINE TRANSFORMATIONS Let us first examine the affine transforms in 2D space, where it is easy to illustrate them with diagrams, then later we will look at the affines in 3D. Consider a point x = (x;y). Affine transformations of x are all transforms that can be written x0= " ax+ by+ c dx+ ey+ f #; where a through f are scalars. x c f x´

Introduction to Computer Graphics
sites.cs.ucsb.edu-2D transformations: rotation, scale, shear -Homogeneous coordinates -Composing transforms -3D transformations 4. GAMES101 Lingqi Yan, UC Santa Barbara Today
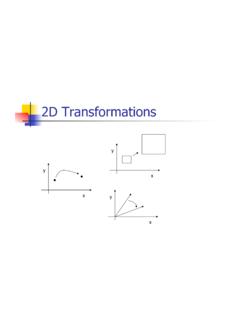
2D Transformations
web.cse.ohio-state.edu2D Transformation Given a 2D object, transformation is to change the object’s Position (translation) Size (scaling) Orientation (rotation) Shapes (shear) Apply a sequence of matrix multiplication to the object vertices

11.1 Camera matrix - Carnegie Mellon University
www.cs.cmu.edu2D image point What do you think the dimensions are? A camera is a mapping between the 3D world and a 2D image. x = PX 2 4 X Y Z 3 5 = 2 4 p 1 p 2 p 3 p 4 p 5 p 6 p 7 p 8 p 9 p 10 p 11 p 12 3 5 2 6 ... so you need the know the transformations between them. P = 2 4 f 0 px 0 fpy 00 1 3 5 2 4 1000 0100 0010 3 5 P = K[I|0] Can be decomposed into ...