Transcription of Course Notes - Purdue University College of Engineering
1 ECE 301: Signals and SystemsCourse NotesProf. Shreyas SundaramSchool of Electrical and Computer EngineeringPurdue UniversityiiAcknowledgmentsThese Notes very closely follow the book:Signals and Systems, 2nd edition, byAlan V. Oppenheim, Alan S. Willsky with S. Hamid Nawab. Parts of the notesare also drawn from Linear Systems and Signalsby B. P. Lathi A Course in Digital Signal Processingby Boaz Porat Calculus for Engineersby Donald TrimI claim credit for all typos and mistakes in the LATEX template forThe Not So Short Introduction to LATEX 2 by T. Oetikeret al. was used to typeset portions of these SundaramPurdue UniversityivContents1 Signals and Systems .. Outline of This Course ..42 Properties of Signals and Signal Energy and Power .. Transformations of Signals .. Periodic, Even and Odd Signals .. Exponential and Sinusoidal Signals .. Complex Exponential Signals.
2 Complex Exponential Signals .. Impulse and Step Functions .. Properties of Systems .. of Systems .. of Systems .. 153 Analysis of Linear Time-Invariant Discrete-Time LTI Systems .. Continuous-Time LTI Systems .. Properties of Linear Time-Invariant Systems .. Commutative Property .. Distributive Property .. Associative Property .. LTI Systems .. of LTI Systems .. of LTI Systems .. of LTI Systems .. Response of LTI Systems .. Differential and Difference Equation Models for Causal LTI Systems Constant-Coefficient Differential Equations .. Constant Coefficient Difference Equations .. Block Diagram Representations of Linear Differential and Differ-ence Equations .. 354 Fourier Series Representation of Periodic Applying Complex Exponentials to LTI Systems.
3 Fourier Series Representation of Continuous-Time Periodic Signals Calculating the Fourier Series Coefficients .. Vector Analogy for the Fourier Series .. Properties of Continuous-Time Fourier Series .. Shifting .. Reversal .. Scaling .. s Theorem .. Fourier Series for Discrete-Time Periodic Signals .. the Discrete-Time Fourier Series Coefficients .. of the Discrete-Time Fourier Series .. 555 The Continuous-Time Fourier The Fourier Transform .. of Fourier Transform .. Fourier Transform of Periodic Signals .. Properties of the Continuous-Time Fourier Transform .. and Frequency Scaling .. s Theorem .. 726 The Discrete-Time Fourier The Discrete-Time Fourier Transform .. The Fourier Transform of Discrete-Time Periodic Signals .. Properties of the Discrete-Time Fourier Transform.
4 And Frequency Shifting .. Order Differences .. Expansion .. in Frequency .. s Theorem .. Convolution .. Multiplication .. 837 The Sampling Theorem .. Reconstruction of a Signal From Its Samples .. Hold .. Hold .. Undersampling and Aliasing .. Discrete-Time Processing of Continuous-Time Signals .. 91viiiCONTENTS8 The Laplace The Laplace Transform .. The Region of Convergence .. The Inverse Laplace Transform .. Fraction Expansion .. Some Properties of the Laplace Transform .. Finding the Ouput of an LTI System via Laplace Transforms .. Finding the Impulse Response of a Differential Equation via LaplaceTransforms .. 106 Chapter Signals and SystemsLoosely speaking,signalsrepresent information or data about some phenomenonof interest. This is a very broad definition, and accordingly, signals can be foundin every aspect of the world around the purposes of this Course , asystemis an abstract object that acceptsinputsignalsand producesoutput signalsin : An abstract representation of a of systems and associated signals: Electrical circuits: voltages, currents, temperature.
5 Mechanical systems: speeds, displacement, pressure, temperature, vol-ume, .. Chemical and biological systems: concentrations of cells and reactants,neuronal activity, cardiac signals, .. Environmental systems: chemical composition of atmosphere, wind pat-terns, surface and atmospheric temperatures, pollution levels, .. Economic systems: stock prices, unemployment rate, tax rate, interestrate, GDP, .. Social systems: opinions, gossip, online sentiment, political polls,.. Audio/visual systems: music, speech recordings, images, video, ..2 Introduction Computer systems: Internet traffic, user input, ..From a mathematical perspective, signals can be regarded as functions of oneor more independent variables. For example, the voltage across a capacitor inan electrical circuit is a function of time. A static monochromatic image canbe viewed as a function of two variables: anx-coordinate and ay-coordinate,where the value of the function indicates the brightness of the pixel at that(x,y) coordinate.
6 A video is a sequence of images, and thus can be viewedas a function of three variables: anx-coordinate, ay-coordinate and a time-instant. Chemical concentrations in the earth s atmosphere can also be viewedas functions of space and this Course , we will primarily be focusing on signals that are functions of asingle independent variable (typically taken to be time). Based on the examplesabove, we see that this class of signals can be further decomposed into twosubclasses: Acontinuous-time signalis a function of the formf(t), wheretrangesover all real numbers ( ,t R). Adiscrete-time signalis a function of the formf[n], wherentakes on onlya discrete set of values ( ,n Z).Note that we use square brackets to denote discrete-time signals, and roundbrackets to denote continuous-time signals. Examples of continuous-time sig-nals often include physical quantities, such as electrical currents, atmosphericconcentrations and phenomena, vehicle movements, etc.
7 Examples of discrete-time signals include the closing prices of stocks at the end of each day, populationdemographics as measured by census studies, and the sequence of frames in adigital video. One can obtain discrete-time signals bysamplingcontinuous-timesignals ( , by selecting only the values of the continuous-time signal at certainintervals).Just as with signals, we can consider continuous-time systems and discrete-time systems. Examples of the former include atmospheric, physical, electricaland biological systems, where the quantities of interest change continuously overtime. Examples of discrete-time systems include communication and computingsystems, where transmissions or operations are performed in scheduled time-slots. With the advent of ubiquitous sensors and computing technology, thelast few decades have seen a move towardshybridsystems consisting of bothcontinuous-time and discrete-time subsystems for example, digital controllersand actuators interacting with physical processes and infrastructure.
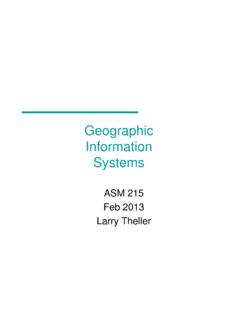
8 We willnot delve into such hybrid systems in this Course , but will instead focus onsystems that are entirely either in the continuous-time or discrete-time termdynamical systemloosely refers to any system that has an internalstate and some dynamics ( , a rule specifying how the state evolves in time). Signals and Systems3 This description applies to a very large class of systems, including individual ve-hicles, biological, economic and social systems, industrial manufacturing plants,electrical power grid, the state of a computer system, etc. The presence of dy-namics implies that the behavior of the system cannot be entirely arbitrary; thetemporal behavior of the system s state and outputs can be predicted to someextent by an appropriatemodelof the a simple model of a car in motion. Let the speed ofthe car at any timetbe given byv(t). One of the inputs to the system is theaccelerationa(t), applied by the throttle.
9 From basic physics, the evolution ofthe speed is given bydvdt=a(t).( )The quantityv(t) is the state of the system, and equation ( ) specifies thedynamics. There is a speedometer on the car, which is a sensor that measuresthe speed. The value provided by the sensor is denoted bys(t) =v(t), and thisis taken to be the output of the of scientific and Engineering endeavor relies on gathering, manipulatingand understanding signals and systems across various domains. For example,in communication systems, the signal represents voice or data that must betransmitted from one location to another. These information signals are oftencorrupted en route by other noise signals, and thus the received signal mustbe processed in order to recover the original transmission. Similarly, social,physical and economic signals are of great value in trying to predict the currentand future state of the underlying systems.
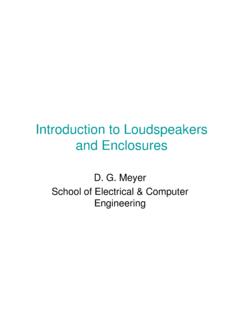
10 The field of signal processing studieshow to take given signals and extract desirable features from them, often viathe design of systems known asfilters. The field of control systems focuseson designing certain systems (known as controllers) that measure the signalscoming from a given system and apply other input signals in order to makethe given system behave in an desirable manner. Typically, this is done via afeedback loopof the formControllerSystemDesiredOutputControl InputOutputSensor Figure : Block Diagram of a feedback control (Inverted Pendulum).Suppose we try to balance a stick verticallyin the palm of our hand. The sensor , controller and actuator in this exampleare our eyes, our brain, and our hand, respectively, which communicate usingsignals of various forms. This is an example of a feedback control Outline of This CourseSince the concepts of signals and systems are prevalent across a wide variety ofdomains, we will not attempt to discuss each specific application in this , we will deal with the underlying mathematical theory, analysis, anddesign of signals and systems.