Transcription of Fixing the Ambiguities - UNB
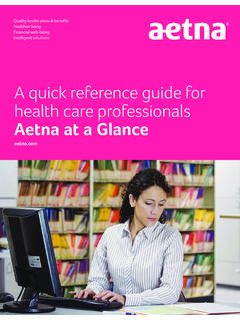
1 Illustrated in Figure 1. This figure is based on1,200 single-epoch experiments, each sepa-rated by 3 seconds. The graph on the top pre-sents a position scatter plot of the so-calledfloat solutions. Note the meter-level scale. Eachdot represents a computed position, based onobservations at a single epoch. For this graph,the Ambiguities were estimated as real (floatingpoint) variates. The graph on the bottom showsthe fixed solution based on exactly the sameobservations, but using the fact that the ambi-guities are integers and constraining the solu-tion to these integer values. Note the scaledifference. Comparing the two graphs showsthat the integer-ambiguity information greatlystrengthens the data-processing model andyields a much more precise ambiguity resolution to be successful,the Ambiguities need to be estimated at theircorrect integer values, as incorrect integersgenerally bias the receiver coordinates con-siderably.
2 However, the integer values aredetermined from noisy observations, and thenoise or uncertainty in the observations prop-agates into the integer values for the ambigu-ities, making them uncertain. Absolute certaintyabout an ambiguity s integer value is thereforenot possible. But if the uncertainty is too large,there is a serious risk of ending up with severelyoffset receiver coordinates. It is thus desirableto achieve as high a degree of certainty as pos-sible. And to effectively control this uncer-tainty, it is desirable to have a mechanism forassessing the probability of correctly estimat-ing the integer Ambiguities . After a moredetailed discussion of the resolution problem,we will introduce a diagnostic tool that willenable one to rigorously assess the reliability ofambiguity AMBIGUITY ESTIMATIONFor the purpose of ambiguity resolution, GNSS data processing is usually carried out in threesequential steps.
3 In the first step, no distinc-tion is made between the nature of the ambi-guities and the other estimated parameters, likereceiver coordinates and atmospheric parameter-estimation problem is solvedwithout taking into account the special integercharacteristic of the Ambiguities . The result soobtained is often referred to as the float solutionGlobal Navigation Satellite System (GNSS)ambiguity resolution is the process of effec-tively accounting for the integer property ofthe unknown initial cycle Ambiguities of carrier-phase data, usually in the form of double dif-ferences. It applies to a great variety of GNSS data-processing models. This holds true notonly for the current Global Positioning Sys-tem (GPS), but also for GLONASS, the futuremodernized GPS, and the proposed EuropeanGalileo system. The GNSS models range fromsingle-baseline models used for kinematic posi-tioning to multibaseline models used as a toolfor monitoring and studying geophysical phe-nomena such as plate tectonics and ionosphericbehavior.
4 The models may have the relativereceiver satellite geometry included (referredto as geometry-based) or excluded (referred toas geometry-free). The geometry is included through the unitdirection vectors in the model s design the geometry is excluded, the receiverbaseline components are not involved asunknowns in the model, but rather thereceiver satellite ranges themselves. The mod-els may also be discriminated as to whetherthe remote receivers are in motion or not. When the receivers are moving, we solve forone or more trajectories, because with thereceiver satellite geometry included, we willhave new coordinate unknowns for each newepoch. We may also discriminate as to whetherthe differential atmospheric delays are includedas unknowns or not. In case of sufficiently shortbaselines, these delays are often the differences in application of thevarious GNSS models, their ambiguity-resolution problems are intrinsically the all cases, the aim is to incorporate the inte-ger property of the Ambiguities into the least-squares adjustment of the data so as to improvethe precision of the results.
5 Once the integerambiguities are known, the corresponding car-rier-phase measurements will act as if they arehigh-precision pseudorange measurements,thereby allowing the remaining parameters,such as receiver coordinates or baseline com-ponents, to be estimated with a comparablehigh improvement, obtained by exploitingthe fact that the Ambiguities are integers, isFixing the AmbiguitiesAre You Sure They re Right?Peter Joosten and Christian Tiberius Delft University of TechnologyFast and precise relative satellite position-ing demands resolution of the integer cycleambiguities. Only then will the correspond-ing carrier-phase measurements act as ifthey were high-precision range measure-ments, thereby allowing the receiver coordi-nates to be estimated with comparable highprecision. Researchers have studied the GPS ambi-guity problem for the past 20 years and haveproposed a wide variety of methods toresolve Ambiguities .
6 So far, most of thesemethods have concentrated on the estima-tionof the Ambiguities . The problem ofassessing the correctnessof the integer num-bers obtained, often referred to as ambigu-ity validation, has received considerablyless mission of this article is to pointout that ambiguity resolution is not strictly amatter of computing integer values for theambiguities. Before really Fixing or con-straining the Ambiguities to the computedintegers in a final baseline computation, weshould assess their accuracy. In otherwords, we should ask ourselves How suream I that these values are correct? In thismonth s contribution, we will look at howwe might answer this question and discusssome new developments in dealing with thestochastic properties of the integer ambigu-ity estimator. The ambiguity success rate ispresented as a tool for determining theprobability of correct integer authors are Peter Joosten, whoholds an degree from the Delft Uni-versity of Technology, and ChristianTiberius, who holds and from that institution.
7 Both areemployed at Delft University of Technol-ogy s Department of Mathematical Geodesyand Positioning. This department is directedby Professor Peter Teunissen, who authoredthe LAMBDA method for ambiguity resolu-tion in 1993. This method has found wide-spread use around the world. Recently,research has been extended to the stochasticproperties of the integer ambiguity estima-tor, the topic of this month s WORLDMay inconsistencies in the data due to mea-surement additional steps are necessary to exploitthe inherent integer nature of the the second step, the ambiguity float solu-because the data-processing software estimatesthe Ambiguities as floating-point numbers. Theparameters are usually estimated using a least-squares algorithm, which is commonlyaccepted as the standard approach to deal withINNOVATIONF igure positioning results on a short baseline are expressed in east,north, and up components.
8 Shown are 1,200 single-epoch solutions for the casewith Ambiguities real-valued (top) and fixed (bottom). For the fixed solution, theambiguities are resolved correctly in all cases. Fixing the integer Ambiguities incor-rectly would generally shift the position solution by a decimeter or more. After suc-cessful Fixing , the precision of the coordinates is below the 1-centimeter (meters)North (meters)Up (meters) (meters)North (meters)Up (meters) WORLDMay 200047 2000 Advanstar Communications, Inc. All Rights toGPS World Newsletterfor information on all the latest developments in GPS policy and technology every two weeks!SUBSCRIPTION RATES:6 months (13 issues) $162 months (26 issues) $ 324 enclosed Credit card: VISA MasterCard AmExCARD _____EXP. DATE _____SIGNATURE _____NAME _____ADDRESS*_____CITY _____STATE _____ ZIP _____*Is this your home address?
9 Yes NoCall toll free: 1-888-527-7008(Outside the call 1-218-723-9477)FAX:1-218-723-9417 Mail:GPS World Newsletter131 West 1st Street Duluth, MN 55802-2065 ADMAG manufacturers currently handle thatstep in the process. The Aircraft Owners and PilotsAssociation (AOPA)expressed con-cern in 1997 about the cost of the com-mercial data. As explained in an FAAreport completed in the fall of 1998, theAOPA argued that, because the govern-ment owns the core of the data andbecause it mandates that updates behandled electronically, governmentsources should make the data further pushed for the data to beprovided on a low- or no-cost basis. There is currently one main vendorfor the navigation databases, the Jep-pesen Companyof Englewood, Col-orado. Now a Times Mirrorcompany,The EU may be interested in devel-oping a new signal standard in coopera-tion with the United States, accordingto Pietro Lo Galbo, head of the Navi-gation Department of the EuropeanSpace Agency s(ESA s) EuropeanSpace Research and Technology Center, which performs the technicalwork and management for ESA pro-jects.
10 Lo Galbo said such a signalwould not necessarily be the same asthat developed for GPS, but mightinclude more power, higher bandwidth,or a different signal devise a new standard, he said,would require cooperation through ajoint technical group made up of European and experts. Accordingto several sources, the EU delegationwanted to establish working groupsimmediately. The United Statesdeclined, however, but agreed to another meeting sometime in January. Despite the best efforts of the WhiteHouse, Department of Transporta-tion (DoT), NASA, and Departmentof Defense (DoD), Congresshas cho-sen not to restore the $17 million need-ed for work on the new civil GPS sig-nals in fiscal year 2000. Officials had tried to get the fundingincluded in one of the spending billsthat kept Congress and the WhiteHouse wrangling until the end ofNovember nearly two months afterthe start of the fiscal year.