Transcription of INTRODUCTION TO DYNAMICS OF STRUCTURES
1 INTRODUCTION TO DYNAMICS OF STRUCTURESA PROJECT DEVELOPED FOR THE UNIVERSITY CONSORTIUM ON INSTRUCTIONAL SHAKE by: Mr. Juan Martin Caicedo Sinique BetancourtDr. Shirley J. Dyke University in Saint LouisThis project is supported in part by the National Science Foundation Grant No. DUE 9950340. Required Equipment: Instructional Shake Table Two Story Building Three Accelerometers MultiQ Board Power Supply Computer Software: Wincon and Matlab INTRODUCTION to DYNAMICS of Structures1 Washington University in St. LouisIntroduction to DYNAMICS of StructuresStructural Control & Earthquake Engineering LaboratoryWashington University in Saint LouisObjective: The objective of this experiment is to introduce you to principles in structural dynam-ics through the use of an instructional shake table.
2 Natural frequencies, mode shapes and dampingratios for a scaled structure will be obtained experimentally. IntroductionThe dynamic behavior of STRUCTURES is an important topic in many fields. Aerospace engineersmust understand DYNAMICS to simulate space vehicles and airplanes, while mechanical engineersmust understand DYNAMICS to isolate or control the vibration of machinery. In civil engineering, anunderstanding of structural DYNAMICS is important in the design and retrofit of STRUCTURES to with-stand severe dynamic loading from earthquakes, hurricanes, and strong winds, or to identify theoccurrence and location of damage within an existing structure.
3 In this experiment, you will test a small test building of two floors to observe typical dynamicbehavior and obtain its dynamic properties. To perform the experiment you will use a bench-scaleshake table to reproduce a random excitation similar to that of an earthquake. Time records of themeasured absolute acceleration responses of the building will be acquired. Theory: DYNAMICS of StructuresTo understand the experiment it is necessary to understand concepts in DYNAMICS of struc-tures. This section will provide these concepts, including the development of the differential equa-tion of motion and its solution for the damped and undamped case.
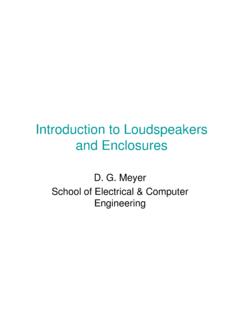
4 First, the behavior of a singledegree of freedom (SDOF) structure will be discussed, and then this will be extended to a multidegree of freedom (MDOF) structure. The number of degrees of freedom is defined as the minimum number of variables that are re-quired for a full description of the movement of a structure. For example, for the single storybuilding shown in figure 1 we assume the floor is rigid compared to the two columns. Thus, thedisplacement of the structure is going to be completely described by the displacement, x, of thefloor.
5 Similarly, the building shown in figure 2 has two degrees of freedom because we need todescribe the movement of each floor separately in order to describe the movement of the to DYNAMICS of Structures2 Washington University in St. One degree of freedomWe can model the building shown in figure 1 asthe simple dynamically equivalent model shown infigure 3a. In this model, the lateral stiffness of thecolumns is modeled by the spring (k), the dampingis modeled by the shock absorber (c) and the massof the floor is modeled by the mass (m).
6 Figure 3bshows the free body diagram of the structure. Theforces include the spring force , the dampingforce , the external dynamic load on the struc-ture, , and the inertial force . These forcesare defined as:(1)(2)(3)where the is the first derivative of the displacement with respect to time (velocity) and is thesecond derivative of the displacement with respect to time (acceleration).Summing the forces shown in figure 3b we obtain (4)(5)where the mass m and the stiffness k are greater than zero for a physical system.
7 Figure 3. Dynamically equivalent model for a one floor mass with spring and damperb. free body diagramxp(t)mp(t)fsfdfikcfst()fdt()pt()f it()fskx =fdcx =fimx =x x Fmx pt()cx kx ==mx cx kx++pt()=Figure 2. Two degree of freedom (t)xxymm2x1k,cmk,cp(t)xxyFigure 1. One degree of freedom to DYNAMICS of Structures3 Washington University in St. Undamped systemConsider the behavior of the undamped system (c=0). From differential equations we knowthat the solution of a constant coefficient ordinary differential equation is of the form (6)and the acceleration is given by.
8 (7)Using equations (6) and (7) in equation (5) and making equal to zero we obtain(8).(9)Equation (9) is satisfied when (10).(11)The solution of equation (5) for the undamped case is(12)where A and B are constants based on the initial conditions, and the natural frequency is de-fined as.(13)Using Euler s formula and rewriting equation (12) yields(14)(15).(16)Using and we have(17)or, xt()e t=x t() 2e t=pt()m 2e tke t+0=e tm 2k+[]0= 2k m-----= ikm---- =xt()Ae nitBe nit += n nkm----=ei t costi tsin+=xt()A nt()cosi nt()sin+()B nt()cosisin nt ()+()+=xt()A nt()cosAi nt()sin+B nt()cosBisin nt ()++= ()cos ()cos= ()sin ()sin =xt()A nt()cosAi nt()sin+B nt()Bisin nt() cos+= INTRODUCTION to DYNAMICS of Structures4 Washington University in St.
9 Louis. (18)Letting and we obtain (19)where C and D are constants that are dependent on the initial conditions of x(t). From equation (19) it is clear that the response of the system is harmonic. This solution iscalled the free vibration response because it is obtained by setting the forcing function, p(t), to ze-ro. The value of describes the frequency at which the structure vibrates and is called the natu-ral frequency. Its units are radians/sec.
10 From equation (13) the natural frequency, , isdetermined by the stiffness and mass of the structure. The vibration of the structure can also be described by the natural period, . The period ofthe structure is the time that is required to complete one cycle given by . (20) Damped system Consider the response with a nonzero damping coefficient . The homogenous solutionof the differential equation is of the form (21)and (22).