Transcription of No-load Current Basics: Practical Guidelines for Assessment
1 1 EASA CURRENTS February 2005 Applied Voltage (% Of Rated)ABCurrent25%125%100%75%50%Full load CurrentContinued On Page 2No- load Current basics : Practical Guidelines For AssessmentBy Chuck YungEASA Technical Support SpecialistHow much No-load Current shouldI expect when testing a motor? Wewould like to have a ratio of no-loadamps / full- load amps, for qualitycontrol purposes.**Many of us expect a motor todraw approximately one-third of ratedcurrent, when operating from ratedvoltage on our test panel. That is agood rule of thumb most of thetime. While there are lots of excep-tions, most of them are explain the rule of thumb andthe exceptions, we will use someterms familiar to most readers:FLA = Full- load ampsNLA = No-load amps; this ismagnetizing Current plus somelosses (mostly windage) flux = Lines of magnetic forceAGD = Airgap density ; in lines offlux per unit areaV = Applied voltageHere are some exceptions youprobably recognize: The higher the flux density , thehigher the No-load Current will beas a percentage of FLA.
2 The lower the speed, the higher theno- load Current , as a percentage The ratio of _____ is inverselyFLA(though not directly) proportionalto GuidelinesThe intent of this article is toexplain why those statements arevalid and, in the process, to offerpractical Guidelines for assessing No-load Current . Many of us apply theseprinciples is power. We should,whenever possible, improve ourknowledge by gathering facts: Use the AC Motor Verification &Redesign Program to checkdensities before rewinding themotor. Keep records of tests for compari-son of identical machines. Get information from the manufac-turer to supplement your we get to the simple tableof expected values for no-loadcurrent, we will lay out some tools touse for understanding the exceptionsto that one-third of FLA , let s review our basic under-standing of the relationship betweenvoltage, flux and AGD2 V2 Effects Of Applied VoltageFor any given motor, flux densitychanges in proportion to the appliedvoltage.
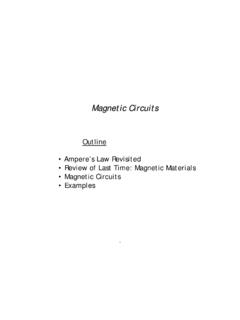
3 Torque produced by themotor varies as the square of the we change the voltage applied to amotor, we expect the Current tochange apply this principle every timewe start a motor at reduced that motor that was too bigto start on the test panel? You simplybrought it up to speed at a fraction ofrated voltage. Then you were able toswitch up to rated 1 illustrates what happenswhen we run an uncoupled motor atvarying voltage. As long as the motorwill maintain speed, we can reducethe voltage and expect a more-or-lesslinear change in demonstrate this, use a motorwithout an external fan. Operate themotor at rated voltage and record thecurrent.
4 Decrease the voltage slowly,recording both voltage and graph the results, and the resultwill be similar to Figure 1. Along thestraight portion of the line, the fluxchanges in proportion to the appliedvoltage. Consequently, we can expectthe Current to change proportionallyalso within the applied voltage is too low, themotor slows down and the currentincreases (left of Point A in Figure 1)as the motor tries to develop enoughtorque to keep turning. The speeddecreases because the torque is too lowto overcome friction & windage losses. 1 1 _____ __Slip AGD2 V2 Figure 1.
5 Graph of applied voltageagainst EASA CURRENTS flux path10-pole flux pathContinued From Page 1 Continued On Page 3 Next slowly raise the voltageabove rated voltage, again recordingthe voltage and Current . As thevoltage increases, the Current increasewill remain linear until we reachsaturation (Point B, Figure 1). Whenthe stator core becomes saturated, ittakes a disproportionate amount ofcurrent to increase the level of Points A and B, voltagegraphed against Current will be more-or-less is one reason we should testrun all repaired motors at ratedvoltage, and record the voltage andcurrent on all phase leads.
6 The No-load test run is a critical step inquality assurance. (See the February2004 CURRENTS article AvoidingHigh No-load Amps. )Some manufacturers are veryfrugal with active materials (steel andcopper cost money, after all), andsome applications require a high hp orkW rating in a small physical pack-age. From Figure 1, we can expectsuch a high flux motor to drawrelatively high No-load Current . It isalso more sensitive to higher-than-rated voltage which may push thecore into saturation . On the otherhand, the motor is usually moreforgiving of under-voltage conditions,compared to a conservatively can expect designs that operateat or near the knee of the saturationcurve to draw higher No-load currentthan those operating along the linearportion of the about conservative designs,such as older U-frame machines?
7 Those, as well as two-polemachines, motors designed for highambient temperatures (kiln motors) orhigh altitude use, are deliberately fluxed low meaning they aredesigned to operate well below theknee of that flux curve. We shouldexpect relatively low No-load more tolerant of high voltage,they are more susceptible to lowvoltage Designs Affect RuleFour-pole machines dominateindustry, so the one-third of ratedcurrent rule is appropriate. But whileone 4-pole motor might be a conser-vative design for a variety of reasons,another might be fluxed higher. So weshould expect the conservative designmotor to draw a bit less than our ruleof thumb.
8 Likewise, the high-fluxdesign might be expected to draw abit higher than the one-third the influence of fluxdensity, we can evaluate motors thatdeviate from our usual And AirgapBecause very low-speed ma-chines are less common, a motor thatdraws three-fourths of rated currentgets our attention. That anomaly iseasy to explain. It takes morecurrent to drive flux through airthan through common test used by ourindustry the open-stator test demonstrates this. We apply one-sixthof rated voltage to an open stator,with the expectation that it will drawclose to rated Current . Why does itdraw full- load Current with only afraction of rated voltage?
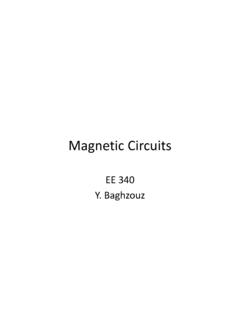
9 There is norotor to complete the flux path, so theflux must travel through air. Thatrequires a lot more Current hencethe lower voltage used for the : Some service centers usehigher than 1/6th of rated voltage, andexpect higher than FLA. But openstator tests at higher voltages make itdifficult to interpret the greater the distance flux has totravel through a non-ferrous medium,the higher the Current required. Foreach trip around a stator, the flux ineach phase has to cross the airgaptwice per pole. Compare a 2-polemachine to a 10-pole. (Figure 2.) Foreach revolution around the stator, the10-pole flux must cross the airgap 20times, while the 2-pole flux only hasto cross it four times.
10 It takes morecurrent to force flux across the airgapthan through the steel Number Of PolesIt should be no surprise that low-speed machines draw relatively highno- load Current . The No-load currentNo- load Current basics : Practical Guidelines For AssessmentFigure 2. 2-pole and 10-pole flux path CURRENTS February 2005 Table 1 Poles of 3-phaseExpected No-load currentApproximateinduction motoras a fraction of FLA21/4 to 1/325-3341/3 to >3/833-4061/3 to <1/233-4581/3 to >5/833-6510 or higher3/5 to >FLA60-110 After calculating the flux densities, we can better evaluate the ratio of No-load Current to full-loadcurrent.