Transcription of The European Robot Initiative for SMEs in …
1 The European Robot Initiative for Strengthening the Competitiveness of SMEs in ManufacturingSMErobot AbschlussworkshopStuttgart, und intuitive Roboterprogrammierungam Beispiel Schwei enRainer Bischoff, KUKA Roboter GmbH2 SMErobot AbschlussworkshopStuttgart, bersicht Einleitung D3 Demonstratoren und Versuchsst nde Ziele, Partner und Rollen Arbeitsumfeld und prozesse Ist-Zustand Entwickelte Demonstratoren und Versuchsst nde allgemeine Vorgehensweise Besonderheiten Bewertung Zusammenfassung und Schlussfolgerungen3 SMErobot AbschlussworkshopStuttgart, Ziele, Partner und Rollen Prozessexperten bef higen, Roboter zu programmieren k rzere Programmierzeiten einfachere Bedienung Roboter als universelles Werkzeug f r Kleinserienfertigung verbesserte Arbeitsbedingungen & ErgonomieZiele der Demonstratoren/Versuchsst ndeKUKAZ eitler, IPAT refflerRoboterherstellerSystemintegrator EndanwenderDemonstratoren/Versuchsst ndeSchwei en inkleinenLosgr enStruktur derLieferkette(Hauptdemonstratoren)4 SMErobot AbschlussworkshopStuttgart, Demonstratoren/Versuchsst ndeHeftschwei enAnforderungenvon roboter(bei Treffler)Demonstrator 3C:bildbasierte Progr.
2 , Widerstands-schwei en f r DrahtgitterprodukteDemonstrator 3B:Montage und Heftschwei en, Manuelles F hren, Ablaufunterst tzungDemonstrator 3A: Bahnschwei en, manuelles F hren, graphische NachbearbeitungBahnschwei enAnforderungenvon TrefflerOnline-Programmierung mit Brenner-Dummy + PDAO ffline-ProgrammingVersuchsstand f r On- AbschlussworkshopStuttgart, berblick heutiges Arbeitsumfeld (Video)6 SMErobot AbschlussworkshopStuttgart, Arbeitsumfeld Umgebung Beispiel: metallverarbeitender Betrieb Fa. Stahl-und Maschinenbau Treffler, P ttmes (bei Augsburg)7 SMErobot AbschlussworkshopStuttgart, Arbeitsumfeld Produkte ca. 800 verschiedene Produkte Losgr e ca. 10-100 einige Werkst cke mit 2D CAD Anpassung an Kundenw nsche,besonders in der LandwirtschaftPr zisionshackstriegelzur mechanischen Unkrautbek mpfung8 SMErobot AbschlussworkshopStuttgart, Arbeitsumfeld Prozesse Spektrum typischer Aufgaben Schneiden, Bohren, Fr sen Schwei en Polieren von Schwei n hten Lackieren, Spr hen MontagePolierenSchwei enSchneiden9 SMErobot AbschlussworkshopStuttgart, Arbeitsumfeld Werkzeuge Typische Ger te und WerkzeugeDemmeler Tisch und Anschl geheftgeschwei te undgeklemmte BauteileKlemmenAnschl gestation re MaschinenSchwei apparat10 SMErobot AbschlussworkshopStuttgart, Arbeitsumfeld Daten Zeitbedarf f r die Produktion in Notf llen: wenige Stunden bei kleinen Werkst cken: 1 - 2 Tage bei gro en Werkst cken.
3 Bis zu mehreren Wochen(wegen der Materialbestellungen) Losgr en typisch: 10-50 (in einer Charge), bis zu 20 Chargen pro Jahr Ausnahme: sehr kleine Serien von 1-10 St ck Landmaschinen: Losgr e 1 Aufteilung manuelle und maschinelle Arbeit 80 % manuelle Arbeit mit Werkzeugen (Schwei en, Entgraten, ..) 20 % Arbeit an Maschinen (Schneiden, Fr sen, ..)11 SMErobot AbschlussworkshopStuttgart, Arbeitsumfeld Kritik und BedarfeZielHeuteKriterium Motivation und Gesundheit verbessern herausfordernde Arbeit mit High-Tech-Maschinen (Roboter, PCs) niedrig: schmutzig, ungesund, langweilig, wiederholend Schwierigkeiten erfahrene Schwei er zu findenAttraktivit t der Arbeit keine Z une, nur Blendschutz Arbeiter sollen Schutzmechanismen nicht aushebeln k nnen Schutz f r Augen, Mund und Ohren erforderlich, aber nicht immer getragenSicherheit bessere Ergonomie zur Verbesserung des Gesundheitszustands (sehr) schlecht, : Heben und Handhaben von schweren und sperrigen Bauteilen, ungesunde K rperhaltungen, giftige D mpfeErgonomie Verk rzen der Lieferz.
4 Ab Bestellung kundenangepasste Produktion begrenzt durch manuelle Prozesse ausreichend f r ProfitProduktivit t weitere Steigerung der Qualit t Nachbearbeitungszeiten reduzieren hohe Qualit t, Genauigkeit, Liefertreue Ehrgeiz der Arbeiter, gute Qualit t zu liefernQualit t noch gr ere Kundenorientierung im Wettbewerb bestehen Kundenorientierung Wettbewerb mit Niedriglohnl ndernsozio- konomisch12 SMErobot AbschlussworkshopStuttgart, L sungsansatz Inkrementeller Ansatz zuerst: Aufsetzen auf dem verf gbarer Stand der Technik danach: Verbesserung des Stands der Technik durch gezielte Hinzunahmevon Forschungsergebnissen, die in separaten Versuchstr gern heranreifen Vorteil des inkrementellen Ansatzes: Fa. Treffler konnte sofort Produktionsprobleme l sen Erfahrungen ber Probleme bei KMUs und kleinen Losgr en aus erster Hand und L sungsvorschl ge aus der Praxis stufenweise Erh hung des Wert des Demonstrators (technisch und wirtschaftlich) bessere R ckmeldung ber Versuchsst nde durch reale Anwendungen und Bauteile Nachteil: hohes konomisches Risiko f r den Fall, dass der Standardroboter v llig ungeeignet ist (was aber nicht der Fall war)13 SMErobot AbschlussworkshopStuttgart, 1:DemmelerTischBereich 2.
5 DrehkipptischKR 16 L6 arcFroniusTPS 4000 Komponenten der Treffler-Roboterzelle14 SMErobot AbschlussworkshopStuttgart, und Inbetriebnahme der Roboterzelle (Dezember 2006)Aufbau (bei ZSA)Tag 1 (Treffler)Tag 2 (Treffler)Tag 3 (Treffler)Tag 4 (Treffler)15 SMErobot AbschlussworkshopStuttgart, Erfahrungen mit Roboterschwei en16 SMErobot AbschlussworkshopStuttgart, Akteure (in D3) Planer (ZSA) Inbetriebnehmer / Einrichter (ZSA) Programmierer (= Prozessexperte) Bediener(= eingewiesener Arbeiter) Servicemitarbeiter (ZSA) Ausbilder (KUKA / ZSA) Akteure und ihre T tigkeiten im Lebenszyklus einer typischen Roboterzelle Planen Installieren / Inbetriebnehmen Einrichten Programmieren / Anschl ge positionieren Anschl ge ndern Bedienen / Programm anpassen Warten Trainierenplannercommissionerworkeropera torservicepersonneltrainerplaninstallset -upprogramoperatemaintaineducateActorsLi fe CycleUse Case Analyse17 SMErobot AbschlussworkshopStuttgart, Demonstratoren und Versuchst nde Demonstrator 3A:Bahnschwei en, manuelles F hren, graphische Nachbearbeitung Demonstrator 3B( Werkers dritte Hand ):Montage und Heftschwei en, manuelles F hren, Ablaufunterst tzung Demonstrator 3C.
6 Bildbasierte Programmierung Online-Programmierungmit Brenner-Dummy + PDA halb- und vollautomatische Offline-Programmierung18 SMErobot AbschlussworkshopStuttgart, 3A: berblickFronius MAG Schwei quelleFronius MAG Schwei quelleSicherheitssystem: KUKA SafeRobotTechnologie, Notaus, LaserscannerSicherheitssystem: KUKA SafeRobotTechnologie, Notaus, LaserscannerKR16, manuelle F hrung ber KMSund RSI-SchnittstelleKR16, manuelle F hrung ber KMSund RSI-SchnittstelleHandgriff mit KMS, Zustimmschalter, Touchup-TasteHandgriff mit KMS, Zustimmschalter, Touchup-TasteBer hrungsbildschirm mit Bedienoberfl cheBer hrungsbildschirm mit Bedienoberfl cheDrehkipptisch,angebunden an ProgrammierumgebungDrehkipptisch,angebun den an Programmierumgebung19 SMErobot AbschlussworkshopStuttgart, 3A: Sicherheitskonzept Sicherheitskonzept nach ISO 10218 umgesetzt mittels KUKA Sicherheitssteuerung in Kombination mit sicherer SPS kollaborativer Betrieb: durch Signallampe angezeigt Notaustaster am Handgriff Zustimmschalter am Handgriff sicherer Betriebshalt sicher berwachte Geschwindigkeit < 250 mm/s automatischer Betrieb: Zugangs berwachung mit SICK Laserscanner automatischer Nothalt beim Betreten des ArbeitsraumsHandgriff mit Zustimm-schalter und Notaus20 SMErobot AbschlussworkshopStuttgart, 3A.
7 Programmieren Programmieren der Schwei bahn durch Vormachen Roboter wird mittels Kraft-Momentensensor (KMS) auf dem gew nschten Weg gef hrt Aufnahme von Schwei punkten und -bahnen durch Tastendruck Drehkipptisch wird ebenfalls mittels KMS bewegt leicht zu erlernen, schnell zu programmieren direkte Kontrolle der Roboterpose Erreichbarkeit direkt sichtbar21 SMErobot AbschlussworkshopStuttgart, 3A: Pfad-Nachbearbeitung Nachbearbeitung ber eine graphische Programmieroberfl che mit 3-D Ansicht, um Punkte, Geschwindigkeiten, Jobs zu ndern keine Texteingaben wie beim richtigen Programmieren erforderlich aufgezeichnete und editierte Punkte werden automatisch in KRL (KUKA Robot Language) bersetzt Stabilit t des Systems und Nachbearbeitung garantiert KUKA ArcTech Schwei technologie-paket integriert Prozessnachbearbeitung m glich22 SMErobot AbschlussworkshopStuttgart, 3A Video23 SMErobot AbschlussworkshopStuttgart, 3A.
8 Testwochen bei Treffler Test und Optimierung bei Treffler Zelle f r zwei Wochen im Dezember und M rz vor Ort aufgebaut Programmieren und Schwei en von Testobjekten und richtigen Bauteilen durch Werker von Treffler (mit Roboterprogrammiererfahrung) Ergebnisse Schwei en in guter Qualit t: Die Bauteile k nnen verkauft werden. Schneller Lernerfolg: in <2h ist man in der Lage, Bauteile zu programmieren; auch Mitarbeiter ohne Programmiererfahrung bis zu 60% Zeitvorteil, abh ngig von der Vorbildung des Werkers Nachbearbeitung braucht Zeit24 SMErobot AbschlussworkshopStuttgart, 3B: Des Werkers 3. Hand basierend auf dem KUKA Leichtbauroboter Schl sseleigenschaften: Momentensensoren und regelung jeder Achse programmierbare Nachgiebigkeit,achsspezifisch und kartesisch aktive D mpfung von Vibrationenbasierend auf Momentenregelung Redundanz (7 Achsen) geringes Gewicht (14 kg) geringe Leistungsaufnahme(funktionsbereit ab 80 W)Typischer Industrieroboter:Nutzlast:14 kgEigengewicht:140 kgLeichtbauroboter:Nutzlast:14 kgEigengewicht:14 kgKUKA KR CDLR basic controller25 SMErobot AbschlussworkshopStuttgart, : Des Werkers 3.
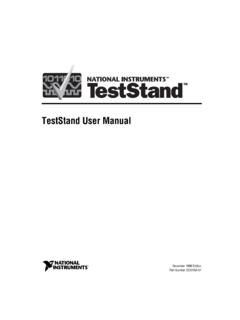
9 Hand Plug and Play - Ortsflexibilit tArbeiten vom Handwagen ausOrtsver nderung in ArbeitszelleHierf r realisierte Eigenschaften: Plug-and-Play -Adapter und Kommunikation f r Robotfu , -hand und -werkzeuge26 SMErobot AbschlussworkshopStuttgart, : Des Werkers 3. Hand Konzept einfache Installation des Roboters am Arbeitsplatz Arbeitsprozesse werden durch Vormachen programmiert virtuelle F hrungshilfen erleichtern das pr zise Anfahren von Posen intelligente Unterst tzung des Werkers w hrend der Produktion durch gelenkte Abl ufe27 SMErobot AbschlussworkshopStuttgart, : Des Werkers 3. Hand Video28 SMErobot AbschlussworkshopStuttgart, : Online-Programmieren mittels Zeigeger t und PDA Motivation schnelles und intuitives Programmieren kleiner Losgr en L sungsansatz Programmieren durch Vormachen mittels Dummy-Werkzeug bersichtliche Programmieroberfl che mit ausgew hlten Funktionen zur Bewegungs- und Prozessprogrammierung wenig Nutzerinteraktion erforderlich, um Programme erzeugen und testen zu k nnen kompaktes, tragbares Ger t29 SMErobot AbschlussworkshopStuttgart, : Online-Programmieren mittels Zeigeger t und PDAV ideo:Online-Programmierenmittels Zeigeger t und PDA30 SMErobot AbschlussworkshopStuttgart, Erste Bewertung (nur Bewegungsprogrammierung, keine Prozessparameter, aber ein Testlauf).
10 7470 Anzahl Punkte gesamt49120 Dauer gesamt [min]2320 Dauer Abfahren+Korrigieren [min]26100 Dauer Teachen [min]29402940L nge N hte [mm]1313 Anzahl Schwei n hte 4642 Anzahl Schwei punkte2828 Anzahl LuftpunkteZeige-ger tKCPK riteriumDa ue r te a che n [min]Da ue r a bfa hren [min]Da ue r gesa mt [min]02040608010012014010020120262349 Programmierzeit [min] Zeitersparnis bis zu 60%!Versuchsstand: Online-Programmieren mittels Zeigeger t und PDA31 SMErobot AbschlussworkshopStuttgart, graphisches Programmieren einer Schwei anwendung Auswahl der Schwei n hte durch Anklicken der Grenzfl chen automatische Bahngenerierung einschlie lich der optimalen Positionierung von Schwei brenner und externer Achsen(um beispielsweise das Werkst ck in Wannenlage zu bringen)Versuchsstand: Halbautomatisches Offline-Programmieren mittels 3D CAD32 SMErobot AbschlussworkshopStuttgart, vollautomatisches Roboterprogrammgenerierung f r eine Schwei anwendung basierend auf automatische Nahterkennung und -klassifizierung Bahnerzeugung auf Basis vordefinierter Regeln und Makros Prozes