Transcription of UNIVERSITA DEGLI STUDI DI ROMA TOR VERGATA
1 UNIVERSIT`A DEGLI STUDI DI ROMATOR VERGATAFACOLT`A DI INGEGNERIACORSO DI LAUREA IN INGEGNERIA 2012/2013 Tesi di LaureaCONTROLLO DI QUOTA E DI ASSETTODI UN ELICOTTERO BIROTORE COASSIALERELATORECANDIDATOIng. Daniele CarnevaleDomenico CappelloAi miei genitori,a mio fratello,a una ragazza Hardware .. e azionamenti .. `a di calcolo .. Software .. board ..72 Analisi delle dinamiche di pitch e roll .. preso in esame .. della matrice di inerzia .. `a di trasmissione servo/rotore .. lineare .. Analisi delle dinamiche di quota ..13 INDICEIINDICE3 Controllo digitale .. Osservatori dello stato.
2 Di pitch e roll .. Controllo dell angolo di pitch .. dei servocomandi .. dallo stato: controllo LQR .. del controllo .. Controllo di quota .. Time-Optimal control ..284 Risultati Simulazioni ..335 Conclusioni e sviluppi futuri38 Appendice A - Codice Arduino39 Appendice B - Codice Matlab, Simulink47 Appendice C - Maple53 Appendice D - Maxima56 Bibliografia64 INDICEIIR ingraziamentiVorrei ringraziare la mia famiglia per avermi sostenuto ed aver reso possibile questotraguardo, Chantal per aver creduto in me ed essermi stata sempre accanto: questoviaggio non sarebbe stato lo stesso senza di ringraziamenti pi`u sentiti vanno al relatore Ing.
3 Daniele Carnevale per averseguito e partecipato a questo lavoro, e a tutti i professori da cui ho avuto modo diimparare in questi anni: mi hanno sempre dimostrato grandissima disponibilit` l Ing. Daniele Zarelli per l interesse mostrato nei confronti del lavoro ditesi e per le chiacchierate trans-oceaniche via Skype ricche di utili i miei compagni di STUDI , che con la loro presenza hanno allietato ognigiornata passata nelle aule dell edificio Didattica e in aula lavoro di tesi presentato nasce con l obiettivo di garantire, tramite le nozioni ac-quisite durante il corso di STUDI , un determinato set di controlli con cui arricchirel esperienza di volo del progetto Rainbow , nato nel 2009 grazie al lavoro dell alloralaureando Ing.
4 Daniele aver affrontato una prima fase di ripristino delle funzionalit`a e di lievi mod-ifiche alla parte elettronica per la gestione della sensoristica presente, si `e passati allapianificazione del software per la piattaforma hardware Arduino e per la stazione il lavoro svolto per determinare una stima della funzione ( ), misuradell influenza della carica di batteria sulla potenza erogata ai motori, un anomalia nelcomportamento dei servocomandi ha portato alla ridefinizione del percorso intrapre-so con la tesi: si `e deciso di proseguire il lavoro evitando il riscontro su campo ,basandosi sui risultati ottenuti su modelli simulativi fedeli al modello `a proposto nel dettaglio il lavoro di analisi svolto al fine di descrivere pi`u fedel-mente possibile il comportamento dinamico di interesse; seguiranno poi, nel capitolo Controllo , la descrizione dei design di controllo modellati e, nel capitolo Risultatiottenuti , i grafici delle varie simulazioni 1 RainbowPresentazione di Rainbow.
5 Nel seguito verranno descritti i varicomponenti hardware e software alla base del progetto che ha comeprotagonista l elicottero birotore HardwareRainbow `e un piccolo elicottero con birotore coassiale la cui parte meccanica `e stataricavata da un modello preesistente ancora commercializzato (Lama V3); due coppiedi lame speculari ne permettono la librazione a partire dal 65 70% della potenzaerogata ai motori, alimentati da una batteria da circa : 1 Rainbow Meccaniche e azionamentiLa soluzione a rotori coassiali `e realizzata con due rotori montati sullo stesso albero chegirano in direzione opposta e non necessita quindi del rotore di coda per la modificadell angolo di bordo sono presenti 4 azionamenti: 2 servocomandi e 2 motori a corrente con-tinua.
6 Il servocomando, spesso abbreviato servo, `e un dispositivo che serve ad attuareun movimento meccanico comandato a distanza; il comando viene impartito tramiteimpulsi positivi di 5V, un segnale PWM (pulse-width modulation). I motori montatia bordo vengono comandati dal microcontrollore tramite segnali in tensione in base adue transistor SensoriIl set di sensori disponibili su Rainbow consiste in:1. un sonar modello LV-MaxSonar-EZ4, utilizzato per il calcolo del livello di quotaraggiunto dall elicottero;2. un giroscopio a tre assi ITG-3200 della InvenSense, che permette di misurarevelocit`a angolari fino ad un massimo di 2000 sec;3.
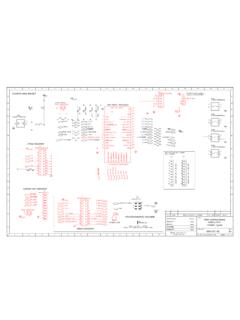
7 Un accelerometro a tre assi BMA180 della Bosch, per il calcolo delle acceler-azioni.`E possibile leggere i dati raccolti da ogni sensore tramite Arduino secondo diversemodalit`a: accelerometro e giroscopio vengono interrogati tramite il protocolloI2C; ilsonar, ogni 49mS, emette un impulso di durata 147mSper pollice 1 Rainbow Unit`a di calcoloArduino `e una piattaforma elettronica open-source di piccole dimensioni dotata di unmicrocontrollore e circuiteria di contorno, molto utilizzata per la creazione di prototipia scopi hobbistici o didattici. Nel progetto in esame `e stato utilizzato il modello ProFigura : Arduino Pro MiniMini, principalmente per le sue dimensioni compatte.
8 Basato sul microcontrolloreATmega168, dispone di 14 pin digitali ingresso/uscita (di cui 6 possono essere usaticome uscite PWM), 8 ingressi analogici, un pulsante di reset e fori per il montaggiodi eventuali connettori. Esistono due versioni del Pro Mini: una da operante a8 MHz, l altra da 5V a 16 MHz (quella utilizzata nel progetto).5 Cap. 1 Rainbow ComunicazioneLa comunicazione fra Rainbow e il computer a terra avviene tramite l utilizzo didue moduli radio xbee . Il modulo xbee `e una soluzione compatibile con lo stan-Figura : Moduli xbee ZigBee/IEEE che soddisfa la necessit`a di una rete a basso costo e abasso consumo, pensata soprattutto per l utilizzo con sensori.
9 I moduli sono semplicida utilizzare, richiedono pochissima energia e costituiscono una soluzione efficace edaffidabile per la trasmissione dei SoftwareIl software realizzato per l obiettivo originario, disponibile alla lettura nelle appendiciA e B, consiste in due programmi in esecuzione sull Arduino a bordo e sulla stazione dicontrollo a terra. Purtroppo il programma in ambiente Simulink di Matlab `e rimastoincompleto a causa della modifica DEGLI obiettivi posti al lavoro di tesi, dovuta ad 1 Rainbow On boardIl programma in esecuzione su Arduino offre una semplice interfaccia alla stazione dicontrollo verso le misure ricavate dai vari sensori e gli azionamenti presenti a linguaggio utilizzato `e un derivato del C e del C++, basato su Wiring.
10 Dopo unaprima fase di inizializzazione dei sensori, della comunicazione e delle variabili relativeai motori, vengono gestite la lettura e l attuazione dei controlli impartiti, se presenti,e l invio dei dati letti a : Tratto da o o p ( ){i f( m i l l i s ( ) TimeControl>= Tc ){i f( s e r i a l A v a i l a b l e ( ) ){c o n t r o l . r e a dd a t a ( ) ;c o n t r o l . a c t u a t e ( ) ;}c o n t r o l . s e n dd a t a ( ) ;TimeControl = m i l l i s ( ) ;}}7 Capitolo Analisi delle dinamiche di pitch e rollUn elicottero birotore coassiale `e costituito principalmente da quattro parti: fusoliera,rotore inferiore, rotore superiore e barra stabilizzatrice; `e inoltre presente uno specialemeccanismo di attuazione chiamato piatto oscillante, che consiste in un disco mon-tato sull albero principale utilizzato per modificare l angolo d inclinazione del due servocomandi a bordo di Rainbow, vincolati fisicamente al piatto oscillante,permettono di modificare l assetto in volo dell elicottero.