
INTRODUCTION TO ROBOTICS - Northwestern University
CONTENTS 4 Forward Kinematics 117 4.1 ProductofExponentialsFormula.....120 4.1.1 FirstFormulation: ScrewAxesExpressedinBaseFrame. 120
Download INTRODUCTION TO ROBOTICS - Northwestern University
Information
Domain:
Source:
Link to this page:
Documents from same domain
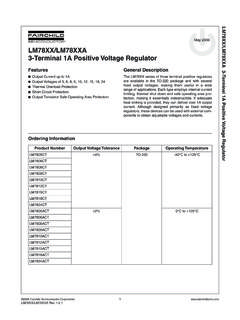
May 2006 LM78XX/LM78XXA 3-Terminal 1A Positive …
hades.mech.northwestern.edu©2006 Fairchild Semiconductor Corporation 1 www.fairchildsemi.com LM78XX/LM78XXA Rev. 1.0.1 LM78XX/LM78XXA 3-Terminal 1A Positive Voltage Regulator
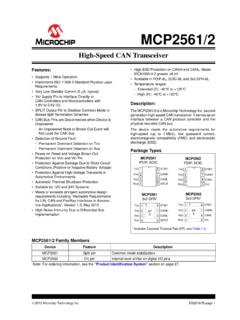
MCP2561/2 Data Sheet - Northwestern University
hades.mech.northwestern.edu2013 Microchip Technology Inc. DS25167B-page 1 MCP2561/2 Features: • Supports 1 Mb/s Operation • Implements ISO-11898-5 Standard Physical Layer

hades.mech.northwestern.edu
hades.mech.northwestern.eduMAS TECH PRECISION MASTECH ENTERPRISES CO. Room 1708-09, Hewlett Centre, 52 Hoi Yuen Road, Kwun Tong,K0w100n, Hong Kong. Tel: …

MODERN ROBOTICS - Northwestern University
hades.mech.northwestern.eduThe book will be published by Cambridge University Press in May 2017, ISBN 9781107156302. Citations of the book should cite Cambridge University Press as the publisher, with a publication date of 2017. Original gures from this book may be reused provided proper citation is given. More

MODERN ROBOTICS - Mech
hades.mech.northwestern.eduMODERN ROBOTICS MECHANICS, PLANNING, AND CONTROL Kevin M. Lynch and Frank C. Park December 30, 2019 This document is the preprint version of the updated rst edition of

MODERN ROBOTICS - Mech
hades.mech.northwestern.eduMODERN ROBOTICS MECHANICS, PLANNING, AND CONTROL Practice Exercises Contributions from Tito Fernandez, Kevin Lynch, Huan Weng, and Zack Woodru December 6, 2018 This is a supplemental document to Modern Robotics Mechanics, Planning, and Control Kevin M. Lynch and Frank C. Park Cambridge University Press, 2017
Related documents

U.S. TSUBAKI ENGINEERING CHAIN DIVISION ENGINEERING …
www.ustsubaki.combarloop chains a-78 attachments and sprockets a-79 ~ a-80 caterpillar drive chains a-81 ~ a-82 bar and pin chains a-83 ~ a-86 introduction a-83 draw bench chains a-84 double flex chains a-85 ~ a-86 specialty chains a-87 ~ a-114 introduction a-87 ~ a-88 rf conveyor chain basic metric series a-89 ~ a-92

SECTION TWO – MIOSHA REGULATIONS - Michigan
www.michigan.govBelts and pulleys, flywheels, chains, sprockets, and gears must all be guarded. These areas are commonly referred to as pinch points. A pinch point means a point at which it is possible to be caught between the moving parts of a machine, between the moving and stationary parts of a machine, or between material and any ...

UNDERCARRIAGE HANDBOOK - West-Trak New Zealand
www.west-trak.co.nzCHAINS JUMPING ON THE SPROCKETS n If the chains are slipping or jumping on the sprockets, it can mean the sprockets are very worn. If the chains and sprockets are new, it may be the track adjuster spring is broken causing it to retract and loosening the chain tension n Some sprockets are offset and will only fit

Overhead Crane Safety and Prevention - Wa
wisha-training.lni.wa.gov-Excessive wear of drive chain sprockets and excessive drive chain stretch. -Deterioration of controllers, master switches, contacts, limit switches, and push-button stations. -Gasoline, diesel, electric, or other power plants for proper operation. -Motion-limit devices that interrupt power or cause a warning to be activated.

Replacement Chainsaw Chain Guide Bars
images.thdstatic.comAll cutting chains can kick back which may result in severe personal injury to the saw operator or bystander. Operate your chainsaw safely. Read all warnings in your chainsaw operator manual. VersaCut™ VersaCut is an ideal choice for arborists, landscapers, and loggers due to its versatility and durability. The semi-chisel cutters makes

Unit 1.1 Mechanisms Activity 1.1.5 Gears, Pulley Drives ...
smacmathpoe.weebly.comActivity 1.1.5 Gears, Pulley Drives, and Sprockets Practice Problems Page 4 of 4 Sprockets and Chains An industrial overhead door has a chain and sprocket system designed to reduce the force needed by an operator to open and close the door. The system consists of two individual systems that are connected through a live axle shaft.

M-6004-A464 4.6L 4V AL Timing Kit INSTALLATION …
performanceparts.ford.cominstallation is done after the gears and chains are in place and properly timed. CAMSHAFT GEAR AND CHAIN INSTALLATION : STEP 1: Install the tensioner. NOTE: LH tensioner is shown, RH tensioner is similar. STEP 2: Install the camshaft sprockets and the chain as an assembly. ! ! ! CAUTION: Timing marks must be at 12 o'clock and camshaft keyways ...