Transcription of Chapter 3 Torsion
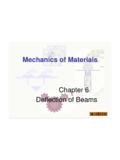
1 Mechanics of MaterialsChapter In many engineering applications, members are required to carry torsional loads. Consider the Torsion of circular shafts. Because a circular crosssection is an efficient shape for resisting torsional loads. Circular shaftsare commonly used to transmit power in rotating machinery. Also discuss another important application Torsion of thin-walled of Circular Shafts a. Simplifying assumptions During the deformation, the cross sections are not distorted in any manner they remain plane, and the radiusr does not change. In addition, the lengthLof the shaft remains constant. Figure Deformation of a circular shaftcaused by the torque T. The initially straight line ABdeforms into a helix. Based on these observations, we make the following assumptions: Circular cross sectionsremainplane(do not warp) and perpendicular to the axis of the shaft.
2 Cross sectionsdo not deform(there is no strain in the plane of the cross section). The distances between cross sectionsdo not change(the axial normal strain is zero). Each cross section rotates as a rigid entityabout the axisof the this conclusion is based on the observed deformation of a cylindrical shaft carrying a constantinternal torque, we assume that the result remains valideven if the diameter of the shaft or the internal torque varies along the length of the shaft. b. Compatibility Because the cross sections are separated by an infinitesimal distance, the difference in their rotations, denoted by the angle d , is also infinitesimal. As the cross sections undergo the relative rotation d ,CDdeforms into the helix observing the distortion of the shaded element, we recognize that the helix angle is the shear strain of the element.
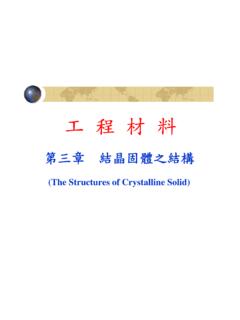
3 (c) 2003 Brooks/Cole Publishing / Thomson Learning (c) 2003 Brooks/Cole Publishing / Thomson Learning From the geometry of (a), we obtain DD = d = dx, from which the shear strain is ( )The quantity d /dxis the angle of twist per unit length,where is expressed in radians. The corresponding shear stress, illustrated in Fig. (b), is determined from Hooke slaw:( )(c) 2003 Brooks/Cole Publishing / Thomson Learning(c) 2003 Brooks/Cole Publishing / Thomson Learning(c) 2003 Brooks/Cole Publishing / Thomson Learning(c) 2003 Brooks/Cole Publishing / Thomson LearningFigure (a) Shear strain of a material element caused by twisting of the shaft; (b) the corresponding shear stress. dxd= dxdGG== the shear stress varies linearlywith the radial distance from the axial of the shaft. The variation of the shear stress acting on the cross section isillustrated in Fig.
4 The maximum shear stress, denoted by max, occurs atthe surface of the shaft. Note that the above derivations assumeneithera constant internal torquenora constant cross sectionalong the length of the Distribution of shear stress along the radius of a circular shaft. dxdGG== The shear force acting on this area is dP= dA= G (d /dx) dA, directed perpendicular to the radius. Hence, the moment (torque)of dPabout the center ois dP= G(d /dx) 2dA. Summing the contributions and equating the result to the internal torque yields Fig. shows a cross section of the shaft containing a differential element of area dAloaded at the radial distance from the axis of the shaft. Figure Calculating the Resultant of the shear stress acting on the cross section. Resultant is a coupleequal to the internal torque T.
5 ,TdPA= TdAdxdGA= 2 Recognizing that is the polar moment of inertia of the cross-sectional area, we can write this equation as G(d /dx) J= T, or ( )The rotation of the cross section at the free end of the shaft, called the angle of twist , is obtained by integration:( )As in the case of a prismatic barcarrying a constant torque, then reduces the torque-twist relationship( )Note the similarity between Eqs. ( ) and the corresponding formulas for axial deformation: and = PL/(EA)GJTdxd= () =LodxEAP/ dxGJTdLoLo == GJTL= Notes on the Computation of angle of Twist the Customary system, the consistent units are G[psi], T [ lb in ] , andL[ in.], and J [ ]; in the SI system, the consistent units are G[ Pa ], T [ N m],L[ m], and J[ m4]. unit of in Eqs. ( ) isradians, regardless of which system of unit is used in the computation.
6 Torques as vectors using the right-hand rule, as illustrated in Fig. The same sign convention applies to theangle of twist .Figure Sign Conventions for Torque Tand angle of twist .d. Torsion formulas G (d /dx) = T/J, which substitution into Eq. ( ), gives the shear stress acting at the distance from the center of the shaft, Torsion formulas:( )The maximumshear stress maxis found by replacing by the radius r of the shaft: ( ) Because Hook s law was used in the derivation of Eqs. ( )-( ), these formulas are valid if the shear stressesdo not exceedthe proportional limitof the material shear. Furthermore, these formulas are applicable only to circular shafts, eithersolid or =JTr=max dxdGG== The expressions for the polar moments of circular areas are :Solid shaft : ( )Hollow shaft : ( ) Equations ( ) and ( ) are called the Torsion ==()()4444max162dDTDrRTR = = Figure Polar moments of inertia of circular transmission Shafts are used to transmit power.
7 The power transmitted by a torque Trotating at the angular speed is given by =T , where is measured in radians per unit time. If the shaft is rotating with afrequencyoff revolutions per unit time, then = 2 f, which gives = T (2 f ). Therefore, the torque can be expressed as( ) In SI units, in usually measured inwatts( W= N m/s) and f in hertz( Hz = rev/s); Eq. ( ) then determines the torqueTinN m. In Customary unitswith in lb finhertz, Eq.( ) calculates the torque Tin lb in. fT 2= Becausepower in Customary units is often expressed in horsepower( hp = 550 lb ft/s= 396 103lb ), a convenient form of Eq.( ) iswhich simplifies to( )()()()() )(3 = ()() )(3revfhpinlbT = indeterminate problems Draw the required free-body diagramsand write the equations of equilibrium.
8 Derive the compatibilityequations from the restrictions imposed on the angles of twist. Use the torque- twist relationshipsin Eqs.( ) to express the angles of twist in the compatibility equations in terms of the torques. Solve the equationsof equilibrium and compatibilityfor the Problem solid steel shaft in a rolling mill transmits 20 kW of power at 2 Hz. Determine the smallest safe diameterof the shaft if the shear stress wis not to exceed 40 MPa and the angle of twist is limited to 6 in a length of 3 m. Use G = 83 GPa. SolutionApplying Eq. ( ) to determine the torque:To satisfy the strength condition, we apply the Torsion formula, Eq. ( ):Which yields d= 10-3 m = mm. 3max16dT =()mNfPT = == () = JTr=max Apply the torque-twist relationship, Eq. ( ), to determine the diameter necessary to satisfy the requirement of rigidity (remembering to convert from degrees toradians):From which we obtain d= 10-3 m = satisfy both strengthand rigidityrequirements, we must choose the larger diameter-namely,d = mm.
9 Answer ()()()32 = GJTL= Sample shaft in Fig. (a) consists of a 3-in. -diameter aluminumsegment that is rigidly joined to a 2-in. -diameter steelsegment. The ends of the shaft are attached to rigid supports, Calculate the maximum shear stress developed in each segment when the torque T= 10 kip in. is applied. Use G = 4 106 psi for aluminum and G = 12 106 psifor Equilibrium Mx= 0 , ( 10 103 ) Tst Tal=0 (a)This problem is statically indeterminate. Compatibilitythe two segments must have the same angle of twist; that is, st= alFrom Eq. ( ), this condition between. from whichTst= Tal(b)Solving Eqs. (a) and (b), we obtain Tal= 4576 lb in. Tst= 5424 lb in. the maximum shear stresses areAnswerAnsweralstGJTLGJTL = ()()()psidTalal86334576161633max== = ()()()psidTstst345025424161633max== = ()()()()()()46463321041262321012123 = alstTTSample four rigid gears, loaded as shown in Fig.
10 (a), are attached to a steel shaft. Compute the angle of rotation of gearArelative to gear D. Use G= 12 106 psi for the shaft. SolutionIt is convenient to represent the torques as vectors (using the right-hand rule) on the FBDs in Fig. (b). SolutionAssume that the internal torquesTAB, TBC, and TCDarepositiveaccording to the sign convention introduced earlier ( positive torque vectors point away from the cross section). Applying the equilibrium condition Mx= 0to each FBD, we obtain 500 900 1000 TCD= 0500 900 TBC = 0500 TAB = 0 TAB =500 lb ft , TBC =-400 lb ftTCD= 600 lb ftTheminussign indicates that the sense of TBCis oppositeto that shown on the gear Dwere fixed. This rotation is obtained by summingthe angles of twist of the three segments: A/D= A/B B /C C/DUsing Eq.( ), we obtain (converting the lengths to inches andtorques to pound-inches) = rad = AnswerThe positive resultindicates that the rotation vector of Arelative to Dis in the positive x-direction: that is, ADis directed counterclockwise when viewed fromAtoward ++=/ ()()()()()()()[]()64101232/2124126001231 240012512500 + = Sample Problem (a) shows a steel shaft of length L = m and diameter d= 25 mm that carries a distributed toque of intensity ( torque per unit length) t= tB(x/L), where tB= 200 N m/m.