Transcription of PyBullet Quickstart Guide
1 PyBullet Quickstart GuideErwin Coumans,Yunfei Bai, 2016-2022 Visitdesktop doc,forums, githubdiscussionsandstarBullet!Introduct ion2 Hello PyBullet World3connect, disconnect, bullet_client3setGravity7loadURDF, loadSDF, loadMJCF7saveState, saveBullet, restoreState11createCollisionShape/Visua lShape12createMultiBody15stepSimulation1 6getBasePositionAndOrientation18resetBas ePositionAndOrientation18 Transforms: Position and Orientation19 Controlling a robot21 Base, Joints, Links21getNumJoints, getJointInfo22setJointMotorControl2/Arra y23getJointState(s), resetJointState28enableJointForceTorqueS ensor29getLinkState(s)30getBaseVelocity, resetBaseVelocity32applyExternalForce/To rque32getNumBodies, getBodyInfo, getBodyUniqueId,removeBody33createConstr aint, removeConstraint,changeConstraint33getNu mConstraints, getConstraintUniqueId35getConstraintInfo /State35getDynamicsInfo/changeDynamics36 setTimeStep39setPhysicsEngineParameter40 resetSimulation42startStateLogging/stopS tateLogging42 Deformables and Cloth (FEM, PBD)
2 44loadSoftBody/loadURDF45createSoftBodyA nchor46 Synthetic Camera Rendering47computeView/ProjectionMatrix4 7getCameraImage48getVisualShapeData51cha ngeVisualShape, loadTexture52 Collision Detection Queries52getOverlappingObjects, getAABB52getContactPoints, getClosestPoints53rayTest, rayTestBatch55getCollisionShapeData56 Enable/Disable Collisions57 Inverse Dynamics, Kinematics60calculateInverseDynamics(2)6 0calculateJacobian, MassMatrix60calculateInverseKinematics(2 )62 Reinforcement Learning Gym Envs65 Environments and Data65 Stable Baselines & ARS, ES,..69 Virtual Reality72getVREvents,setVRCameraState72 Debug GUI, Lines, Text, Parameters74addUserDebugLine, Text, Parameter74addUserData77configureDebugVi sualizer78get/resetDebugVisualizerCamera 78getKeyboardEvents, getMouseEvents80 Plugins81loadPlugin,executePluginCommand 81 Build and install PyBullet82 Support, Tips, Citation852 IntroductionPyBullet is a fast and easy to use Python module for robotics simulation and machine learning,with a focus on sim-to-real transfer.
3 With PyBullet you can load articulated bodies from URDF,SDF, MJCF and other file formats. PyBullet provides forward dynamics simulation, inversedynamics computation, forward and inverse kinematics, collision detection and ray intersectionqueries. TheBullet Physics SDKincludes PyBulletrobotic examples such as a simulatedMinitaur quadruped, humanoids running using TensorFlow inference and KUKA arms graspingobjects. Reduced coordinate multibodies, rigidbodies and deformables are handled by a unifiedLCP constraint solver, similar to the Articulated Islands Algorithm in thisthesis, It uses theArticulated Body Algorithm for linear time forward dynamics andcreationof the solver A from physics simulation, there are bindings to rendering, with a CPU renderer(TinyRenderer) and OpenGL rendering and visualization and support for Virtual Realityheadsets such as HTC Vive and Oculus Rift.
4 PyBullet also has functionality to perform collisiondetection queries (closest points, overlapping pairs, ray intersection test etc) and to add debugrendering (debug lines and text). PyBullet has cross-platform built-in client-server support forshared memory, UDP and TCP networking. So you can run PyBullet on Linux connecting to aWindows VR wraps the newBullet C-API, which is designedto be independent from the underlyingphysics engine and render engine, so we can easily migrate to newer versions of Bullet, or usea different physics engine or render engine. By default, PyBullet uses the Bullet API on theCPU. We will expose Bullet running on GPU using OpenCL as well.
5 There is also a C++ APIsimilar to PyBullet , can be easily used with TensorFlow and OpenAI Gym. Researchers fromGoogle Brain[1,2,3,4],X[1,2], Stanford AI Lab [1,2,3],OpenAI,INRIA[1] andmany other labsuse PyBullet . Ifyou use PyBullet in your research, please add installation of PyBullet is as simple as (sudo) pip install PyBullet (Python ), pip3 installPyBullet. This will expose the PyBullet module as well as pybullet_envs Gym PyBullet WorldHere is a PyBullet introduction script that we discuss step by step:import PyBullet as pimport timeimport pybullet_dataphysicsClient = ( )#or for non-graphical ( ()) # (0,0,-10)planeId = (" ")startPos = [0,0,1]startOrientation = ([0,0,0])boxId = (" ",startPos, startOrientation)#set the center of mass frame (loadURDF sets base link frame) (boxId, startPos,startOrientation)for i in range (10000) () ( )cubePos, cubeOrn = (boxId)print(cubePos,cubeOrn) ()
6 Connect, disconnect, bullet_clientAfter importing the PyBullet module, the first thing to do is 'connecting' to the physics is designed around a client-server driven API, with a client sending commands and aphysics server returning the status. PyBullet has some built-in physics servers: DIRECT andGUI. Both GUI and DIRECT connections will execute the physics simulation and rendering inthe same process as that in DIRECT mode you cannot access the OpenGL and VR hardware features, asdescribed in the "Virtual Reality" and "Debug GUI, Lines, Text, Parameters" chapters. DIRECT mode does allow rendering of images using the built-in software renderer through the'getCameraImage' API.
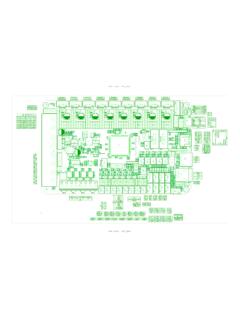
7 This can be useful for running simulations in the cloud on serverswithout can provide your own data files, or you can use the PyBullet_data package that ships withPyBullet. For this, import pybullet_data and register the directory ( ()).4getConnectionInfoGiven a physicsClientId will return the list [isConnected, connectionMethod]isConnectedisConnected will return true if connected, false otherwise, given a a command is not processed by the server within a specific time out value, the client willdisconnect. Use setTimeOut to specify this value in with various physics client (blue) and physics server (green) options.
8 Dark greenservers provide OpenGL debug using DIRECT, GUIThe DIRECT connection sends the commands directly to the physics engine, without using anytransport layer and no graphics visualization window, and directly returns the status afterexecuting the GUI connection will create a new graphical user interface (GUI) with 3D OpenGL rendering,within the same process space as PyBullet . On Linux and Windows this GUI runs in a separatethread, while on OSX it runs in the same thread due to operating system limitations. On MacOSX you may see a spinning wheel in the OpenGL Window, until you run a 'stepSimulation' orother PyBullet commands and status messages are sent between PyBullet client and the GUI physicssimulation server using an ordinary memory is also possible to connect to a physics server in a different process on the same machine oron a remote machine using SHARED_MEMORY, UDP or TCP networking.
9 See the sectionabout Shared Memory, UDP and TCP for almost all other methods, this method doesn't parse keyword arguments, due tobackward connect input arguments are:requiredconnection modeinteger:DIRECT,GUI,SHARED_MEMORY,UDP , TCPGUI_SERVER,SHARED_MEMORY_SERVER,SHARE D_MEMORY_GUIDIRECT mode create a new physics engine and directlycommunicates with it. GUI will create a physics engine withgraphical GUI frontend and communicates with will connect to an existing physics engineprocess on the same machine, and communicates with it overshared memory. TCP or UDP will connect to an existingphysics server over TCP or UDP is similar to GUI but also acts as a serverthatallows external SHARED_MEMORY is similar to DIRECT but alsoacts as a server that allows external SHARED_MEMORY connections.
10 SHARED_MEMORY_GUI is similar to DIRECTbut will attempt to connect to an external graphics server fordisplay. The Bullet ExampleBrowser has an option to act asPhysics Server or Graphics SHARED_MEMORY mode, optional shared memory starting ExampleBrowser or SharedMemoryPhysics_*you can use optional command-line --shared_memory_key toset the key. This allows to run multiple servers on the (UDP and TCP)stringIP address or host name, for example " " or "localhost"or " "optionalport(UDP and TCP)integerUDP port number. Default UDP port is 1234, default TCP portis 6667 (matching the defaults in the server)optionaloptionsstringcommand-line option passed into the GUI can set the background color, with red/green/blueparameters in the range [ ] as ( , options="--background_color_red=1--backg round_color_blue=1 --background_color_green=1")Other options are:--mouse_move_multiplier= (mouse sensitivity)--mouse_wheel_multiplier= (mouse wheel sensitivity)--width=<int> width of the window in pixels--height=<int> height of the window, in (records movie, requires ffmpeg)--mp4fps=<int> (for movie recording, set frames per second).