Transcription of Review of First- and Second-Order System Response 1 First ...
1 MASSACHUSETTS INSTITUTE OF TECHNOLOGYDEPARTMENT OF MECHANICAL Advanced System Dynamics and ControlReview of First - and Second-Order System Response11 First -Order Linear System Transient ResponseThe dynamics of many systems of interest to engineers may be represented by a simple modelcontaining one independent energy storage element. For example, the braking of an automobile,the discharge of an electronic camera flash, the flow of fluid from a tank, and the cooling of a cupof coffee may all be approximated by a First -order differential equation, which may be written in astandard form as dydt+y(t) =f(t)(1)where the System is defined by the single parameter , the System time constant, andf(t) is aforcing function.
2 For example, if the System is described by a linear First -order state equation andan associated output equation: x=ax+bu(2)y=cx+du.(3)and the selected output variable is the state-variable, that isy(t) =x(t), Eq. (3) may be rearrangeddydt ay=bu,(4)and rewritten in the standard form (in terms of a time constant = 1/a), by dividing throughby a: 1adydt+y(t) = bau(t)(5)where the forcing function isf(t) = ( b/a)u(t).If the chosen output variabley(t) is not the state variable, Eqs. (2) and (3) may be combinedto form an input/output differential equation in the variabley(t):dydt ay=ddudt+ (bc ad)u.
3 (6)To obtain the standard form we again divide through by a: 1adydt+y(t) = dadudt+ad bcau(t).(7)Comparison with Eq. (1) shows the time constant is again = 1/a, but in this case the forcingfunction is a combination of the input and its derivativef(t) = dadudt+ad bcau(t).(8)In both Eqs. (5) and (7) the left-hand side is a function of the time constant = 1/aonly, andis independent of the particular output variable Rowell 10/22/041 Example 1A sample of fluid, modeled as a thermal capacitanceCt, is contained within an insulatingvacuum flask. Find a pair of differential equations that describe 1) the temperature ofthe fluid, and 2) the heat flow through the walls of the flask as a function of the externalambient temperature.
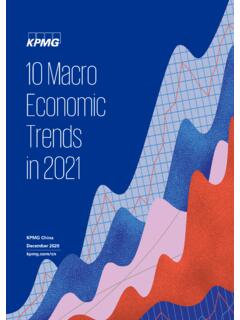
4 Identify the System time 1: A First -order thermal model representing the heat exchange between a laboratory vacuumflask and the :The walls of the flask may be modeled as a single lumped thermal resistanceRtand a linear graph for the System drawn as in Fig. 1. The environment is assumedto act as a temperature sourceTamb(t). The state equation for the System , in terms ofthe temperatureTCof the fluid, isdTCdt= 1 RtCtTC+1 RtCtTamb(t).(i)The output equation for the flowqRthrough the walls of the flask isqR=1 RtTR= 1 RtTC+1 RtTamb(t).(ii)The differential equation describing the dynamics of the fluid temperatureTCis founddirectly by rearranging Eq.
5 (i):RtCtdTCdt+TC=Tamb(t).(iii)from which the System time constant may be seen to be = differential equation relating the heat flow through the flask isdqRdt+1 RtCtqR=1 RtdTambdt.(iv)This equation may be written in the standard form by dividing both sides by 1/RtCt,RtCtdqRdt+qR=CtdTambdt,(v)and by comparison with Eq. (7) it can be seen that the System time constant =RtCtand the forcing function isf(t) =CtdTamb/dt. Notice that the time constant isindependent of the output variable The Homogeneous Response and the First -Order Time ConstantThe standard form of the homogeneous First -order equation, found by settingf(t) 0 in Eq.
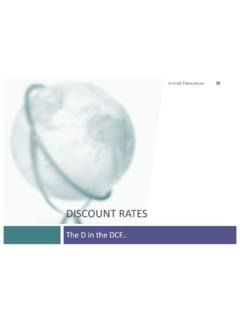
6 (1),is the same for all System variables: dydt+y= 0(9)and generates the characteristic equation: + 1 = 0(10)which has a single root, = 1/ . The System Response to an initial conditiony(0) isyh(t) =y(0)e t=y(0)e t/ .(11)024681001234 Time (secs)tSystem responsey(t)t = -3t = -5t = -10t = 10t = 5t = < 0stablet > 0t infiniteFigure 2: Response of a First -order homogeneous equation y+y(t) = 0. The effect of the systemtime constant is shown for stable systems ( >0) and unstable systems ( <0).A physical interpretation of the time constant may be found from the initial condition responseof any output variabley(t).
7 If >0, the Response of any System variable is an exponential decayfrom the initial valuey(0) toward zero, and the System isstable. If <0 the Response growsexponentially for any finite value ofy0, as shown in Fig. , and the System isunstable. Althoughenergetic systems containing only sources and passive linear elements are usually stable, it is possibleto create instability when an active control System is connected to a System . Some sociological andeconomic models exhibit inherent instability. The time-constant , which has units of time, is thesystem parameter that establishes the time scale of System responses in a First -order System .
8 Forexample a resistor-capacitor circuit in an electronic amplifier might have a time constant of a fewmicroseconds, while the cooling of a building after sunset may be described by a time constant ofmany is common to use a normalized time scale,t/ , to describe First -order System responses. Thehomogeneous Response of a stable System is plotted in normalized form in Fig. 3, using both thenormalized time and also a normalized Response magnitudey(t)/y(0):y(t)/y(0) =e (t/ ).(12) time t/ty(t)/y(0) 3: Normalized unforced Response of a stable First -order t/ y(t)/y(0) =e t/ ys(t) = 1 e t/ 1: Exponential components of First -order System responses in terms of normalized timet/.
9 The third column of Table 1 summarizes the homogeneous Response after periodst= ,2 , ..Aftera period of one time constant (t/ = 1) the output has decayed toy( ) =e 1y(0) or of itsinitial value, after two time constants the Response isy(2 ) = (0).Several First -order mechanical and electrical systems and their time constants are shown in For the mechanical mass-damper System shown in Fig. 4a, the velocity of the mass decays fromany initial value in a time determined by the time constant =m/B, while the unforced deflectionof the spring shown in Fig.
10 4b decays with a time constant =B/K. In a similar manner thevoltage on the capacitor in Fig. 4c will decay with a time constant =RC, and the current inthe inductor in Fig. 4d decays with a time constant equal to the ratio of the inductance to theresistance =L/R. In all cases, if SI units are used for the element values, the units of the timeconstant will be (t)mBmBF(t)BKV(t)BKV(t)v = 0refv = 0refRC+-V(t)V(t)V = 0refRCLRI(t)I(t)V = 0refLRFigure 4: Time constants of some typical First -order 2A water tank with vertical sides and a cross-sectional area of 2 m2, shown in Fig.