Transcription of Vibration of single degree of - Anasayfa
1 VibrationofsingledegreeofVibration of single degree of freedom Prof. Dr. Pelin Gundes ScheduleAhihdibh ifhildffd A short review on the dynamic behaviour of the single degree of freedom systems A short review on the dynamic behaviour of multi degree of freedom structures Objectives for Vibration monitoring Fourier Series Expansion, Fourier Transforms, Discrete Fourier Transform Digital signal processing, problems associated with analog to digital conversion, sampling, llkdflaliasing, leakage, windowing, filters Steps in instrumenting a structure, selection and installation of instruments,maintenance.
2 Ib tiit ttiittdfifi tidtiitivibration instrumentation, exciters, transducers, performance specification, data acquisition systems, strong motion data processingCourseScheduleCourse ScheduleRdiblhiii llilidli Random variables, stochastic processes, statistical analysis, correlation and convolution, coherence, time and frequency domain representation of random dynamic loads Dynamicresponseofsingleandmultidegreeoff reedomsystemstorandomloads Dynamic response of single and multi degree of freedom systems to random loads Modal analysis Applications in bridges, buildings, mechanical engineering and aerospace structures MATLAB exercises Term Projects ReferencesReferencesMdlliModal analysis: Heylen W.
3 , Lammens S. And Sas P., Modal Analysis Theory and Testing , Katholieke Universiteit Leuven, 1997. EwinsDJ ModalTestingTheoryPracticeandApplication (MechanicalEngineering Ewins , Modal Testing, Theory, Practice, and Application (Mechanical Engineering Research Studies Engineering Design Series), Research Studies Pre; 2 edition (August 2001) ISBN 13: 978 0863802188 Maia, , ,ResearchMaia, N. M. M. and Silva, J. M. and Experimental Modal Analysis, Research Studies Press Ltd,, Hertfordshire, 1997, 488 pp.,ISBN 0863802087 Signal processing: Blackburn, James A, Modern instrumentation for scientists and engineers, New York : ,,fg,Springer, 2001 Stearns S.)
4 D. and David, R. A., Signal Processing Algorithms in Matlab, Prentice Hall Inc, 1996 Mitra , Digital Signal Processing , A Computer based approach, Mc Graw Hill, 3rd Edition, 2006. Heylen W., Lammens S. And Sas P., Modal Analysis Theory and Testing , Katholieke Universiteit Leuven, 1997. Keith Worden Signal Processing and Instrumentation , Lecture Notes, processing: Lynn, P. A. Introductory Digital Signal processing With Computer Applications. John Wiley & Sons, 1994. Stearns D. D. and David, R. A., Signal Processing Algorithms in Matlab, Prentice Hall Inc, 1996 Ifeachor and Jervis Digital Signal Processing: A Practical Approach, Addison Wesley, 1997 General Vibration theory Rao , Mechanical vibrations , Pearson, Prentice Hall, 2004.
5 Inman , Engineering Vibration , Prentice Hall, 1994. Meirovitch L., Fundamentals of vibrations , McGrawHill, vibrations: Bendat and Piersol , Random data analysis and measurement procedures , Wiley Series in Probability and Statistics, 3rd Edition, ,, Lutes and Sarkani S., Random Vibrations: Analysis of structural and mechanical systems , Elsevier, 631 pp, 2004. Newland , An introduction to random vibrations, spectral and wavelet analysis , Longman, 1975/1984/1993. Soong and Grigoriu, Random Vibration of mechanical and structural systems , Prentice Hall, 1993. Wirsching and Paez and Ortiz K.
6 Random vibrations: Theory and Practice , John Wiley and sons, 1991995. Bendat and Piersol Engineering applications of correlation and spectral analysis , John Wiley and Sons, 2ndEdition, 1993. ,,ReferencesReferencesVibiIiVibration Instrumentation: Vibration , monitoring, testing and instrumentation handbook, CRC Press, Taylor and Francis, EditedbyClarenceWDeSilvaEdited by: Clarence W. De Silva. Aszkler C., Acceleration, shock and Vibration sensors , Sensors handbook, Chapter 5, pages 137159137 159. McConnell , Vibration testing, theory and practice , John Wiley and Sons, 1995.
7 Prerequisites:Basic knowledge on structural analysis. VibrationbasedhealthmonitoringVibration based health monitoringBiIftiBasic Information: : Assoc. Prof. Dr. Pelin Gundes Bakir( ~gundes Email: Office hours TBD by email appointmentWbit Website: ~gundes/lectures Lecturetime:Wednesday14 00 17 00 Lecture time: Wednesday Lecture venue: NH 404 VibrationbasedhealthmonitoringVibration based health monitoring Vibrationbasedstr ct ralhealthmonitoring iltidi i li Vibration based structural health monitoring is a multidisciplinary research topic. The course is suitable both for undergraduate and graduate students as well as the following departments: Civil engineering Earthquake engineering Mechanicalengineering Mechanical engineering Aerospace engineering Electrical and electronic engineeringVibrationbasedhealthmonitorin gVibration based health monitoringBasic Information: 70 % attendance is : Quiz+homeworks: 35% Mid term project:25% Final project.)
8 40%Introduction ConceptsfromvibrationsConcepts from vibrations Degrees of freedom Classification of vibrationConceptsfromvibrationsConcepts from vibrations NEWTON S LAWSF irstlaw:First law: If there are no forces acting upon a particle, then the particle will move in a straight line with constant law: Aparticleacteduponbyaforcemovessothatthe forcevectorisequaltoA particle acted upon by a force moves so that the force vector is equal to the time rate of change of the linear momentum law: When two particles exert forces upon one another, the forces lie along the linejoiningtheparticlesandthecorrespondi ngforcevectorsaretheline joining the particles and the corresponding force vectors are the negative of each The minimum number of independent coordinates required to determine completely the positions of all parts of a system at any instant of time defines the degree of freedom of the system.
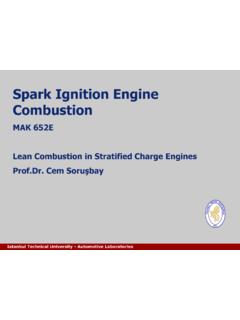
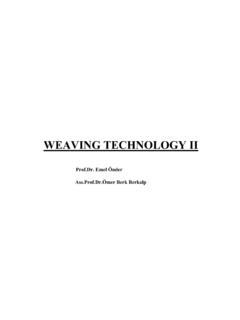
9 Asingle degree of freedom systemrequires only one coordinate to describe its position at any instant of degree of freedom systemFthildlithfithtibttdithitf dIfth For the simple pendulum in the figure, the motion can be stated either in terms of or x and y. If the coordinates x and y are used to describe the motion, it must be recognized that these coordinates are not independent. They are related to each other through the relation 222lyx=+where l is the constant length of the pendulum. Thus any one coordinate can describe the motion of the pendulum. In this example, we find that the choice of as the independent coordinate will be more +convenient than the choice of x and degree of freedom systemSlftdffdthithfiThfi tfiht Some examples of two degree of freedom systems are shown in the figure.
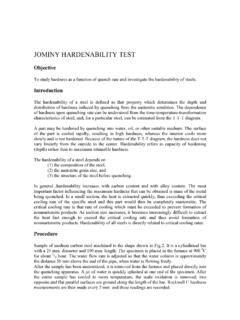
10 The first figure shows a two mass two spring system that is described by two linear coordinates x1and x2. The second figure denotes a two rotor system whose motion can be specified in terms of 1 and 2. The motion of the system in the third figure can be described completely either by X and or by x,y and and continuous systemsAlbfti ltbdibdifi itbfdffdh A large number of practical systems can be described using a finite number of degrees of freedom, such as the simple system shown in the previous slides. Some systems, especially those involving continuous elastic members, have an infinite number of degrees of freedom as shown in the figure.