Transcription of What is a CNC Machine? CNC : Computerised Numerical ...
1 WhatisaCNCM achine?CNC:ComputerisedNumericalControl( Computer+NumericalControl) Numericalcontrolisaprogrammableautomatio ninwhichprocessiscontrolledbyNumbers,Let ters,andsymbols. CNCM achiningisaprocessusedinthemanufacturing sectorthatinvolvestheuseofcomputerstocon trolmachinetoolslikelathes, Tomanufacturecomplexcurvedgeometriesin2 Dor3 Dwasextremelyexpensivebymechanicalmeans( whichusuallywouldrequirecomplexjigstocon trolthecuttermotions) MachiningcomponentswithhighRepeatability andPrecision Unmannedmachiningoperations Toimproveproductionplanningandtoincrease productivity However,sincethegrooveintheballscrewishe lical,itssteelballsrollalongthehelicalgr oove,and,then,theymaygooutoftheballnutun lesstheyarearrestedatacertainspot. Itconsistsofascrewspindle,anut,ballsandi ntegratedballreturnmechanismashowninFigu re. , configuration3 Thus,itisnecessarytochangetheirpathafter theyhavereachedacertainspotbyguidingthem ,oneafteranother,backtotheir startingpoint (formationofarecirculationpath).
2 Therecirculationpartsplaythatrole. Whenthescrewshaftisrotating,asshowninFig ure,asteelballatpoint(A)travels3turnsofs crewgroove,rollingalongthegroovesofthesc rewshaftandtheballnut,andeventuallyreach espoint(B). Then,theballisforcedtochangeitspathwayat thetipofthetube,passingbackthroughthetub e,untilitfinallyreturnstopoint(A). Wheneverthenutstrokesonthescrewshaft, Whendebrisorforeignmatterentertheinsideo fthenut,itcouldaffectsmoothnessinoperati onorcauseprematurewearing,eitherofwhichc ouldadverselyaffecttheballscrew'sfunctio ns. Topreventsuchthingsfromoccurring, HighmechanicalefficiencyInballscrews,abo ut90% ,theamountofforceusedtorotatethescrewsha ftisaslowasonethirdofthatneededfortheacm ethreadleadscrew. LowinwearBecauseofrollingcontact, , forms (a) Gothic arc (b) Circular arc ThreadFormThethreadformusedinthesescrews caneitherbegothicarctype( )orcirculararctype( ). PreloadingInordertoobtainbidirectionalmo tionofthecarriagewithoutanypositionalerr or, (tensionorcompression) (spacer) (deflections) nut preloading Zerobacklash:Iteliminatesaxialplaybetwee nascrewshaftandaballnut.
3 Itminimizeselasticdeformationcausedbyext ernalforce,thustherigidityenhances. Incasemountingerrors,misalignmentbetween thescrewshaftandthenutmayoccurthisfurthe rgeneratesdistortionforces. Thiscouldleadtotheproblemssuchas,Shorten edservicelifeAdverseeffectonsmoothoperat ionReducedpositioningaccuracyGenerationo fnoiseorvibrationBreakageofscrewshaft9 Advantagesofballscrews Highlyefficientandreliable. Lessstartingtorque. Lowercoefficientoffrictioncomparedtoslid ingtypescrewsandrunatcoolertemperatures Powertransmissionefficiencyisveryhighand isoftheorderof95%. Couldbeeasilypreloadedtoeliminatebacklas h. Thefrictionforceisvirtuallyindependentof thetravelvelocityandthefrictionatrestisv erysmall;consequently,thestick-slippheno menonispracticallyabsent,ensuringuniform ityofmotion. Haslongerthreadlifehenceneedtobereplaced lessfrequently. Ballscrewsarewell-suitedtohighthroughout put,highspeedapplicationsorthosewithcont inuousorlongcycletimes.
4 Tendtovibrate. Requireperiodicoverhaulingtomaintainthei refficiency. Inclusionofdirtorforeignparticlesreduces thelifeofthescrews. Notasstiffasotherpowerscrews,thusdeflect ionandcriticalspeedcancausedifficulties. Theyarenotself-lockingscrewshencecannotb eusedinholdingdevicessuchasvices. Ballscrewsareemployedincuttingmachines,s uchasmachiningcenterandNClathewhereaccur atepositioningofthetableisdesired Usedintheequipment'ssuchaslithographiceq uipmentorinspectionapparatuswhereprecise positioningisvital Highprecisionballscrewsareusedinsteppers forsemiconductormanufacturingindustriesf orprecisionassemblyofmicroparts. Usedinroboticsapplicationwhereprecisionp ositioningisneeded. Usedinmedicalexaminationequipment' Constructionaldetails: Basicallyconventionalmachinehave2axes,kn ownasX&Yaxis. ThereisalsoaZaxislongwhichonlythebedmove svertically. , CNCmachineshavemorerigidconstructionwhen comparedtotheconventionalmachine. Theslideways, Recirculatingballleadscrewsandantifricti onslideways Theslidewaysonaconventionalmachineoperat eundertheconditionsofslidingfriction.
5 TheleadscrewsareusuallyoftheAcmethreadfo rm, , Rollingfrictioncanbeusedinsteadofsliding friction,wherere-circulatingrollerbearin gsarepositionedundertheslideways. Arecirculatingballleadscrew, ,lessfrictionalresistance,lowertorquereq uired,moreprecisepositioningofslides, Use of Stepping Motors in Slide Movement Adigitalsignalissentfromthecontrollertot hemotorintheformofpulses,whichwillcauset hemotortorotatethroughaspecifiedangle, :Iffivedigitalpulsesaresenttothestepperm otorthenitwillrotatebyfivesteps, ,thereisnoneedforpositionalorvelocityfee dback18 MAJORCOMPONENTSRELATEDTOCNCMACHINETOOLSA nyCNCmachinetoolessentiallyconsistsofthe followingparts: Partprogram: Aseriesofcodedinstructionsrequiredtoprod uceapart. Controlsthemovementofthemachinetoolandon /offcontrolofauxiliaryfunctionssuchasspi ndlerotationandcoolant. Thecodedinstructionsarecomposedofletters , Programinputdevice Theprograminputdeviceisthemeansforpartpr ogramtobeenteredintotheCNCcontrol.
6 Threecommonlyusedprograminputdevicesarep unchtapereader,magnetictapereader, Machine Control UnitThe machine control unit (MCU) is the heart of a CNC system. It is used to perform the following functions: To read the coded instructions. To decode the coded instructions. To implement interpolations (linear, circular, and helical) to generate axis motion commands. To feed the axis motion commands to the amplifier circuits for driving the axis mechanisms. To receive the feedback signals of position and speed for each drive axis. To implement auxiliary control functions such as coolant or spindle on/off and tool MachineTool CNCcontrolsareusedtocontrolvarioustypeso fmachinetools. Regardlessofwhichtypeofmachinetooliscont rolled,italwayshasaslidetableandaspindle tocontrolpositionandspeed. ThemachinetableiscontrolledintheXandYaxe s, FeedBackSystem Thefeedbacksystemisalsoreferredtoastheme asuringsystem. Itusespositionandspeedtransducerstoconti nuouslymonitorthepositionatwhichthecutti ngtoolislocatedatanyparticularinstant.
7 DriveSystem Drivesareusedtoprovidecontrolledmotionto CNCelements Adrivesystemconsistsofamplifiercircuits, drivemotors,andballlead-screws. TheMCUfeedsthecontrolsignals(positionand speed)ofeachaxistotheamplifiercircuits. Inmachinetools,powerisgenerallyrequiredf ordrivingthemainspindle,saddlesandcarria gesandtosomeauxiliaryunits. ThemotorsusedforCNCsystemareoftwokinds Electrical-AC,DCorSteppermotors Fluid-HydraulicorPneumatic InCNC,usuallystepperandservoelectricaldr ivesareused Theyexhibitfavourabletorque-speedcharact eristicsandarerelativelyinexpensive. POWER DRIVES25 ,itiswidelyusedinlowcost, :oPermanentMagnetEmploypermanentmagnetLo wspeed,relativelyhightorqueoVariableRelu ctanceDoesnothavepermanentmagnetLowtorqu e26 Rotorisapermanentmagnet. (PM)steppermotor to15 Figureshowsasimple,90 PMmotorwithfourphases(A-D). Applyingcurrenttoeachphaseinsequencewill causetherotortorotatebyadjustingtothecha ngingmagneticfields. Althoughitoperatesatfairlylowspeed, ,3,1,andsoon,themotorwillrotateina30 stepangle.
8 Inthenon-energizedcondition,thereisnomag neticfluxintheairgap,asthestatorisanelec tromagnetandtherotorisapieceofsoftiron;h ence, Variable reluctance stepper motorVariableReluctanceMotor Thecylindricalrotorismadeofsoftsteelandh asfourpoles Ithasfourrotorteeth,90 apartandsixstatorpoles,60 apart. Hybridsteppingmotorscombineapermanentmag netandarotorwithmetalteethtoprovidefeatu resofthevariablereluctanceandpermanentma gnetmotorstogether. Thenumberofrotorpolepairsisequaltothenum berofteethononeoftherotor' stepper29 Rotationofahybridsteppingmotorisproduced inthesimilarfashionasapermanentmagnetste ppingmotor,byenergizingindividualwinding sinapositiveornegativedirection. Whenawindingisenergized,northandsouthpol esarecreated,dependingonthepolarityofthe currentflowing. Therotormovesonesteptoaligntheoffsetmagn etizedrotorteethtothecorrespondingenergi zedwindings. Hybridmotorsaremoreexpensivethanmotorswi thpermanentmagnets,buttheyusesmallerstep s,havegreatertorqueandmaximumspeed.
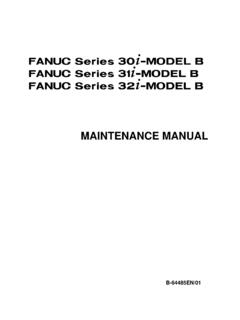
9 Stepangleofasteppermotorisgivenby,31 Advantagesofsteppermotors Lowcost Ruggedness Simplicityofconstruction Lowmaintenance Lesslikelytostallorslip Willworkinanyenvironment Excellentstart-stopandreversingresponses Disadvantagesofsteppermotors LowtorquecapacitycomparedtoDCmotors Limitedspeed Duringoverloading, Servomotors are special electromechanical devices that produce precise degrees of rotation. A servo motor is a DC or AC or brushless DC motor combined with a position sensing device. Servomotors are also called control motors as they are involved in controlling a mechanical system. The servomotors are used in a closed-loop servo system as shown in Figure A reference input is sent to the servo amplifier, which controls the speed of the servomotor. Servo system block diagram SERVO MOTORS33 Afeedbackdeviceismountedonthemachine,whi chiseitheranencoderorresolver. Thisdevicechangesmechanicalmotionintoele ctricalsignalsandisusedasafeedback.
10 Thisfeedbackissenttotheerrordetector,whi chcomparestheactualoperationwiththatofth ereferenceinput. Ifthereisanerror,thaterrorisfeddirectlyt otheamplifier, Inmanyservosystems,bothvelocityandpositi onaremonitored. Servomotorsprovideaccuratespeed,torque, ,namely:oDCmotorogearassemblyoposition-s ensingdeviceocontrolcircuit35AC servo motor Magneticforceisgeneratedbyapermanentmagn etandcurrentwhichfurtherproducethetorque . ,rotorcoreandapermanentmagnet. , Provideshighintermittenttorque,hightorqu etoinertiaratio,andhighspeeds Workwellforvelocitycontrol Availableinallsizes Quietinoperation SmootherrotationatlowerspeedsDisadvantag esofservomotors Moreexpensivethansteppermotors Requiretuningofcontrolloopparameters Notsuitableforhazardousenvironmentsorinv acuum Excessivecurrentcanresultinpartialdemagn etizationofDCtypeservomotor37 LINEAR MOTION DRIVES Linearmotiondrivesaremechanicaltransmiss ionsystemswhichareusedtoconvertrotarymot ionintolinearmotion.