Transcription of Variable modal parameter identification for non-linear mdof ...
1 229 Variable modal parameter identification fornon-linear mdof systemsPart II: Experimental validation and advancedcase Chong and M. Imregun Imperial College of Science Technology and Medicine,Mechanical Engineering Department, ExhibitionRoad, London SW7 2BX, UKTel.: +44 20 7594 7068; Fax: +44 20 7584 1560;E-mail: and 6 June 1999 Revised 5 January 2000 The purpose of Part II is to provide an experimental valida-tion of the methodology presented in Part I and to consider arepresentative engineering case, the study of which requiresa relatively large numerical model. A beam system with cu-bic stiffness type non-linearity was used in the experimentalstudy. The non-linear response was measured at three loca-tions and the underlying linear system was obtained via linearmodal analysis of low-excitation response data. The non-linear parameter variations were obtained as a function of themodal amplitude and the response of the system was gener-ated for other force levels.
2 The results were found to agreevery well with the corresponding measurements, indicatingthe success of the non-linear modal analysis methodology,even in the presence of true experimental noise. An advancednumerical case study that included both inherent structuraldamping and non-linear friction damping, was considerednext. The linear finite element model of a high-pressure tur-bine blade was used in conjunction with three local non-linearfriction damper elements. It was shown that the response ofthe system could be predicted at any force level, providedthat that non-linear modal parameters were available at somereference force level. The predicted response levels werecompared against those obtained from reference simulationsand very good agreement was achieved in all cases. Corresponding Experimental verificationThe schematic view of the rig that was designed forthe experimental verification of the non-linear modalanalysis methodology is shown in Fig.
3 1. The objectiveof the experiment was twofold: (i) to validate the har-monic balance program that was used for reference da-ta generation, and (ii) to validate the non-linear modalanalysis procedure by comparing directly- measuredand regenerated responses for several excitation levels,the latter being obtained from the identified non-linearmodal linear part of the rig consists of uniform beamA (420 12 18 mm, E=196GN/m2and =7900Kg/m3) which is clamped at one end. The non-linear part is formed by two clamped-clamped beams,B1 and B2, whose mid points are connected to thefree end of the linear beam A. The connection is viaa bolt, fastened to a force transducer on one side andto a block mass on the other. With beams B1 andB2 being clamped at both ends, a cubic stiffness typenon-linearity is produced by increasing the longitudinaltension under a large vertical displacement.
4 For thepurposes of dynamic testing, three accelerometers wereplaced at 6 mm, 82 mm and 308 mm from the free endof the linear beam. The experiment consisted of staticand dynamic testing of both the linear and Static testsThe purpose of the static tests was to confirm thelinearity of Beam A and to evaluate the non-linear stiff-ness coefficient for Beams B1 and B2. During therig design stage, it was decided that a vibration ampli-tude larger than 4 mm would be difficult to achieve indynamic experiments and the non-linear part was de-Shock and Vibration 7 (2000) 229 240 ISSN 1070-9622 / $ 2000, IOS Press. All rights Chong and M. Imregun / Variable modal parameter identification for non-linear mdof systems part IIBeam ABeam B1/B2 Force transducerBlock massFig. 1. Experimental 10-3-200-150-100-50050100150200 Displacement (m) Force (N) Fig.
5 2. Displacement-force characteristic for Beams B1 to produce sufficient non-linear force within thatrange. The tests were carried out using a linear variabledisplacement transducer (LVDT) and a load cell. Thedisplacement-force characteristic of Beam A was foundto be linear while that of Beams B1/B2, shown in Fig. 2,has the expected cubic stiffness characteristic. Its poly-nomial was estimated asP= 11800 105x3+6500x,wherePis the force andxis the displacement. The ad-ditional mass due to the non-linear element and sensorswas Vibration testsTwo separate dynamic tests were carried out to mea-sure the response of the linear and non-linear parts ofthe test rig. Here linear test refers to Beam A only whilethe non-linear test refers to the whole assembly. Inter-est was confined to the translational degrees of freedomonly and sine testing via a suitable frequency responseanalyser (Beran 402) was used Chong and M.
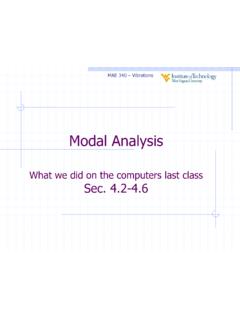
6 Imregun / Variable modal parameter identification for non-linear mdof systems part II2311762 Fig. 3. FE model of Beam [dB re 1m/N]Fig. 4. non-linear and linearised responses:Measured non-linear response,..Low-excitation (linearised) A was excited for the 0 1500 Hz range and 4distinct modes were observed. A finite element (FE)model of Beam A was built in parallel (Fig. 3). Atthe clamped end of Beam A, a translational spring of20E6N/mand a rotational spring of 10 KNm/radwere added to simulate more realistic boundary con-ditions. The additional mass and stiffness due to theaccelerometers, force transducer and shaker s push rodwere also incorporated to the model. In addition to theFE modelling, a linear modal analysis was also carriedout on the measured FRFs and the response was regen-erated from the extracted linear modal parameters. Itwas found that all three curves, namely the original FRFmeasurement, the regeneration using linear modal pa-rameters and the FE prediction, were almost identical,a feature that confirms the linearity of Beam response measurements on the completesystem are much more difficult because of the need tocontrol either the force or the vibration amplitude.
7 Anexisting data acquisition system, designed to removethe unwanted higher harmonics of the input force sig-nal while controlling its amplitude, was used for thispurpose [3]. The non-linear response measurementswith feedback control were conducted for the 0 250 Hzfrequency range for force levels of N, N and1 N (Fig. 4). The response was linearised by using thelowest possible excitation and the corresponding curveis also plotted in Fig. 4. It is seen that the non-linearityaffects mainly the 1st mode, probably due to the factthat the response for the 2nd mode is much linear modal analysis of the 1st and 2nd modeswas carried out and the regenerated response was foundto be very close to the linearised response, indicatingthat a good underlying linear model had been , a non-linear modal analysis was performed onthe responses obtained for the N excitation.
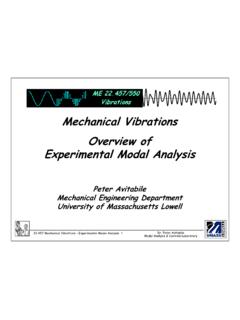
8 The ex-tracted non-linear modal parameters are shown in Fig. 5for the 1st mode. These are seen to exhibit the expectedcharacteristics of stiffness hardening type the variation of the natural frequency parameteris well captured by a cubic polynomial, the fit for thebkjparameter is less satisfactory. This is somewhatexpected as thebkjparameter is much smaller in mag-nitude and, as was demonstrated in Part I, more proneto measurement the extracted parameter variations were curve-fitted, the non-linear responses were predicted at Chong and M. Imregun / Variable modal parameter identification for non-linear mdof systems part II1234567x 104 modal amplitude, Q1 121234567x 10-4-2024681012x 10-3 modal amplitude, Q1b21 Fig. 5. non-linear modal parameter variation for the 1st mode:Extracted values, ** Curve-fitted levels of , and 1 N. Fig.
9 6 shows the pre-dicted and measured responses, all curves exhibiting awell-known characteristic of non-linear systems, name-ly multiple states around resonances. These states Chong and M. Imregun / Variable modal parameter identification for non-linear mdof systems part II2332025303540455055606570-85-80-75-70- 65-60-55-50-45-40-35 Freq/HzReceptance[dB re 1m/N]2025303540455055606570-85-80-75-70- 65-60-55-50-45-40-35 Freq/HzReceptance [dB re 1m/N]Fig. 6. Predictions for the 1st mode:Predicted response,..Measured of high and low responses on either side of the res-onance and of an unstable region around it. In standardmeasurements, the unstable region cannot be obtainedbecause the structure cannot be made to vibrate in Chong and M. Imregun / Variable modal parameter identification for non-linear mdof systems part IIArea A**Fig. 7. FE Model of blade: Measurement state.
10 However, the feedback control usedhere enabled the beam-shaker system to remain stableand continuous response curves were obtained by ap-proaching the resonance from low and high frequenciesin two separate frequency sweeps. Therefore the mea-sured response curves are the same in Figs. 6(a) and (b).On the other hand, either increasing (Fig. 6(a)) or de-creasing (Fig. 6(b)) frequency sweeps were used duringthe numerical predictions. In both cases, the solutionat the previous frequency was used as an initial guess atthe current frequency. With this approach, the responsetends to follow the same state until instability is encoun-tered and there is a jump to the higher (or lower) state atthis point. Because of the different use of the increasingand decreasing frequency sweeps, the location of thejump phenomenon is different for the measured and thepredicted responses.