
STATE-FEEDBACK CONTROL
ECE4520/5520: Multivariable Control Systems I. 6–1 STATE-FEEDBACK CONTROL 6.1: State-feedback control We are given a particular system having dynamics x.t/P D Ax.t/CBu.t/ y.t/D Cx.t/CDu.t/: We know that open-loop system poles are given by eigenvalues of A. Want to use input u.t/ to change the dynamics.
Download STATE-FEEDBACK CONTROL

Information
Domain:
Source:
Link to this page:
Documents from same domain
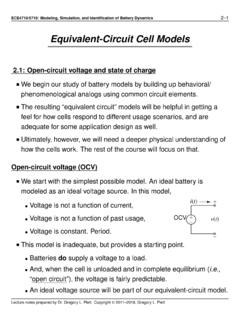
Equivalent-Circuit Cell Models
mocha-java.uccs.edu• Voltage is constant. Period. OCV v(t) i(t) − − + + This model is inadequate, but provides a starting point. • Batteries do supply a voltage to a load. • And, when the cell is unloaded and in complete equilibrium (i.e., “open circuit”), the voltage is fairly predictable. • An ideal voltage source will be part of our equivalent ...
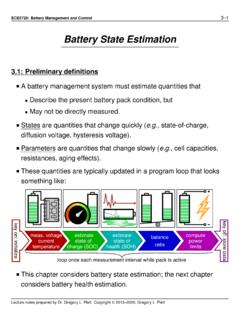
Battery State Estimation
mocha-java.uccs.eduModel-based state estimators implement algorithms that use sensor measurements to infer the internal hidden state of a dynamic system. System Model Measured Output Predicted Output Input Process Noise Sensor Noise True System State State Est. A mathematical model of the system is assumed known. Same input propagated through true system and model.

FREQUENCY-RESPONSE ANALYSIS
mocha-java.uccs.edufrequency-response for a specific frequency from the plot. We will see later that the polar plot will help us determine st ability properties of the plant and closed-loop system. Plot method #2: Magnitude and phase plots We can replot the data by separating the plots for magnitude a nd phase making two plots versus frequency.

State-Space Models and the Discrete-Time Realization …
mocha-java.uccs.eduDiscrete-Time Realization Algorithm 5.1: Introduction to state-space models The coupled PDEs derived in earlier chapters of notes are too complex to be used in real-time applications. •They are “infinite dimensional.” For every point in time t, there are an infinite number of x- and r- dimension variables to solve for. •i.e., c s(x,r ...
Related documents

Understanding Poles and Zeros 1 System Poles and Zeros
web.mit.eduFigure 1: The pole-zero plot for a typical third-order system with one real pole and a complex conjugate pole pair, and a single real zero. 1.1 The Pole-Zero Plot A system is characterized by its poles and zeros in the sense that they allow reconstruction of the …

Control Engineering Problems with Solutions
anandsrys.weebly.comof the polynomials A(s) and B(s) or in the zero-pole-gain form. A state space model represents an th n order differential equation by a set of n first order differential equations represented by four matrices A, B, C and D. For a single-input single-output system (SISO) the dimensions are nxn; 1xn, an n column

Comandos e Funções do MATLAB - UERJ
www.eng.uerj.brlqr Linear quadratic regulator design for continuous systems, see also dlqr lsim Simulate a linear system, see also step, impulse, dlsim. margin Returns the gain margin, phase margin, and crossover frequencies, see also bode norm Norm of a vector nyquist1 Draw the Nyquist plot, see also lnyquist1. Note this command was written to

MatlabTutorial : Root Locus
my.ece.utah.edu2.0 Root Locus Design Consider all positive values of k. In the limit as k -> 0, the poles of the closed-loop system are a(s) = 0 or the poles of H(s). In the limit as k -> infinity, the poles of the closed-loop system are b(s) = 0 or the zeros of H(s). No matter what we pick k to be, the closed-loop system must always have n poles, where n is the