Transcription of A CAN Physical Layer Discussion
1 M AN228. A CAN Physical Layer Discussion The Physical Medium Attachment (PMA) and Medium Author: Pat Richards Dependent Interface (MDI) are the two parts of the Microchip Technology Inc. Physical Layer which are not defined by CAN. The Physical Signaling (PS) portion of the Physical Layer is INTRODUCTION defined by the can specification . The system designer Many network protocols are described using the seven can choose any driver/receiver and transport medium Layer Open System Interconnection (OSI) model, as as long as the PS requirements are met.
2 Shown in Figure 1. The Controller Area Network (CAN) The International Standards Organization (ISO) has protocol defines the Data Link Layer and part of the defined a standard which incorporates the CAN speci- Physical Layer in the OSI model. The remaining physi- fication as well as the Physical Layer . The standard, cal Layer (and all of the higher layers) are not defined by ISO-11898, was originally created for high-speed in- the can specification . These other layers can either be vehicle communications using CAN. ISO-11898 speci- defined by the system designer, or they can be imple- fies the Physical Layer to ensure compatibility between mented using existing non-proprietary Higher Layer CAN transceivers.
3 Protocols (HLPs) and Physical layers. A CAN controller typically implements the entire CAN. The Data Link Layer is defined by the CAN specifica- specification in hardware, as shown in Figure 1. The tion. The Logical Link Control (LLC) manages the over- PMA is not defined by CAN, however, it is defined by load control and notification, message filtering and ISO-11898. This document discusses the MCP2551. recovery management functions. The Medium Access CAN transceiver and how it fits in with the ISO-11898. Control (MAC) performs the data encapsulation/decap- specification .
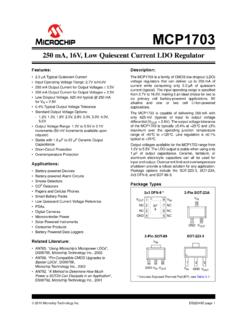
4 Sulation, error detection and control, bit stuffing/de- stuffing and the serialization and deserialization functions. FIGURE 1: CAN AND THE OSI MODEL. 7- Layer OSI. Application Presentation Session Logical Link Control (LLC). Transport - Acceptance filtering - Overload notification Network - Recovery management Data Link Medium Access Control (MAC). Physical - Data encapsulation/decapsulation Defined by CAN Controller - Frame coding (stuffing/de-stuffing). - Error detection/signaling - Serialization/deserialization Physical Signaling - Bit encoding/decoding ISO11898.
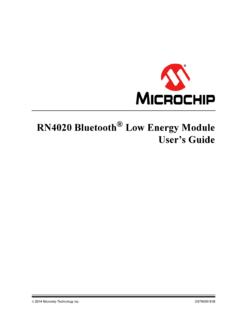
5 - Bit timing/synchronization Physical Medium Attachment Transceiver - Driver/receiver characteristics MCP2551. Medium Dependent Interface - Connectors/wires 2002 Microchip Technology Inc. Preliminary DS00228A-page 1. AN228. ISO11898-2 OVERVIEW FIGURE 2: DIFFERENTIAL BUS. ISO11898 is the international standard for high-speed CAN communications in road vehicles. ISO-11898-2 Dominant specifies the PMA and MDA sublayers of the Physical CANH. Voltage Level (V). Layer . See Figure 3 for a representation of a common CAN node/bus as described by ISO-11898.
6 Recessive Recessive VDIFF. Bus Levels CAN specifies two logical states: recessive and domi- CANL. nant. ISO-11898 defines a differential voltage to repre- sent recessive and dominant states (or bits), as shown in Figure 2. In the recessive state ( , logic 1' on the MCP2551. TXD input), the differential voltage on CANH and CANL Time (t). is less than the minimum threshold (< receiver input or < transmitter output)(See Figure 4). In the dominant state ( , logic 0' on the MCP2551. Connectors and Wires TXD input), the differential voltage on CANH and CANL ISO-11898-2 does not specify the mechanical wires is greater than the minimum threshold.
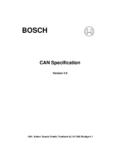
7 A dominant bit and connectors. However, the specification does overdrives a recessive bit on the bus to achieve require that the wires and connectors meet the electri- nondestructive bitwise arbitration. cal specification . The specification also requires 120 (nominal) termi- nating resistors at each end of the bus. Figure 3 shows an example of a CAN bus based on ISO-11898. FIGURE 3: CAN BUS. MCU. CAN Controller Transceiver Node Node 120 120 . DS00228A-page 2 Preliminary 2002 Microchip Technology Inc. AN228. FIGURE 4: ISO11898 NOMINAL BUS LEVELS.
8 V. CANH. CANL. V V. Dominant Dominant Differential Differential Output Input Range Range Recessive Recessive Differential Differential Output Input Range Range Robustness communications of the CAN node. The transceiver must survive short circuits on the CAN bus inputs from The ISO11898-2 specification requires that a compliant -3V to +32V and transient voltages from -150V to or compatible transceiver must meet a number of elec- +100V. Table 1 shows the major ISO11898-2 electrical trical specifications. Some of these specifications are requirements, as well as MCP2551 specifications.
9 Intended to ensure the transceiver can survive harsh electrical conditions, thereby protecting the TABLE 1: COMPARING THE MCP2551 TO ISO11898-2. ISO-11898-4 MCP2551. Parameter Unit Comments min max min max DC Voltage on CANH and CANL -3 +32 -40 +40 V Exceeds ISO-11898. Transient voltage on CANH and CANL -150 +100 -250 +250 V Exceeds ISO-11898. Common Mode Bus Voltage + -12 +12 V Exceeds ISO-11898. Recessive Output Bus Voltage + + + + V Meets ISO-11898. Recessive Differential Output Voltage -500 +50 -500 +50 mV Meets ISO-11898. Differential Internal Resistance 10 100 20 100 k Meets ISO-11898.
10 Common Mode Input Resistance 50 50 k Meets ISO-11898. Differential Dominant Output Voltage + + + + V Meets ISO-11898. Dominant Output Voltage (CANH) + + + + V Meets ISO-11898. Dominant Output Voltage (CANL) + + + + V Meets ISO-11898. Permanent Dominant Detection (Driver) Not Required ms Power-On Reset and Brown-Out Detection Not Required Yes -- 2002 Microchip Technology Inc. Preliminary DS00228A-page 3. AN228. Bus Lengths the same bit time. Figure 5 shows a one-way propaga- tion delay between two nodes. Extreme propagation ISO11898 specifies that a transceiver must be able to delays (beyond the sample point) will result in invalid drive a 40m bus at 1 Mb/s.