Transcription of AN857 Brushless DC Motor Control Made Easy …
1 2002-2011 Microchip Technology 1AN857 INTRODUCTIONThis application note discusses the steps of developingseveral controllers for Brushless motors. We cover sen-sored, sensorless, open-loop, and closed-loop is even a controller with independent voltage andspeed controls so you can discover your Motor s char-acteristics code in this application note was developed withthe Microchip PIC16F877 PIC microcontroller, in con-jucntion with the In-Circuit Debugger (ICD). This com-bination was chosen because the ICD is inexpensive,and code can be debugged in the prototype hardwarewithout need for an extra programmer or emulator.
2 Asthe design develops, we program the target device andexercise the code directly from the MPLAB environ-ment. The final code can then be ported to one of thesmaller, less expensive, PIC microcontrollers. Theporting takes minimal effort because the instruction setis identical for all PIC 14-bit core devices. It should also be noted that the code was bench testedand optimized for a Pittman N2311A011 Brushless DCmotor. Other motors were also tested to assure that thecode was generally of a BLDCF igure 1 is a simplified illustration of BLDC Motor con-struction.
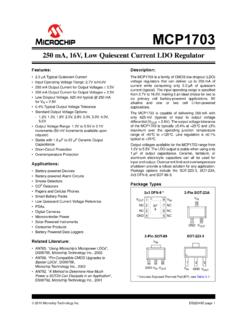
3 A Brushless Motor is constructed with a per-manent magnet rotor and wire wound stator energy is converted to mechanical energy bythe magnetic attractive forces between the permanentmagnet rotor and a rotating magnetic field induced inthe wound stator poles. FIGURE 1:SIMPLIFIED BLDC Motor DIAGRAMSA uthor:Ward BrownMicrochip Technology DC Motor Control made EasyAN857DS00857B-page 2 2002-2011 Microchip Technology this example there are three electromagnetic circuitsconnected at a common point.
4 Each electromagneticcircuit is split in the center, thereby permitting the per-manent magnet rotor to move in the middle of theinduced magnetic field. Most BLDC motors have athree-phase winding topology with star connection. Amotor with this topology is driven by energizing twophases at a time. The static alignment shown inFigure 2, is that which would be realized by creating anelectric current flow from terminal A to B, noted as path1 on the schematic in Figure 1.
5 The rotor can be madeto rotate clockwise 60 degrees from the A to B align-ment by changing the current path to flow from terminalC to B, noted as path 2 on the schematic. The sug-gested magnetic alignment is used only for illustrationpurposes because it is easy to visualize. In practice,maximum torque is obtained when the permanent mag-net rotor is 90 degrees away from alignment with thestator magnetic field. The key to BLDC commutation is to sense the rotorposition, then energize the phases that will produce themost amount of torque.
6 The rotor travels 60 electricaldegrees per commutation step. The appropriate statorcurrent path is activated when the rotor is 120 degreesfrom alignment with the corresponding stator magneticfield, and then deactivated when the rotor is 60 degreesfrom alignment, at which time the next circuit is acti-vated and the process repeats. Commutation for therotor position, shown in Figure 1, would be at the com-pletion of current path 2 and the beginning of currentpath 3 for clockwise rotation.
7 Commutating the electri-cal connections through the six possible combinations,numbered 1 through 6, at precisely the right momentswill pull the rotor through one electrical the simplified Motor of Figure 1, one electrical revo-lution is the same as one mechanical revolution. Inactual practice, BLDC motors have more than one ofthe electrical circuits shown, wired in parallel to eachother, and a corresponding multi-pole permanent mag-netic rotor. For two circuits there are two electrical rev-olutions per mechanical revolution, so for a two-circuitmotor, each electrical commutation phase would cover30 degrees of mechanical CommutationThe easiest way to know the correct moment to com-mutate the winding currents is by means of a positionsensor.
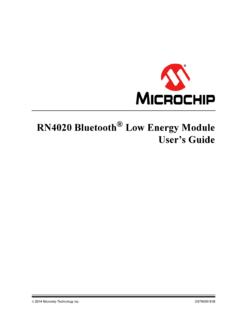
8 Many BLDC Motor manufacturers supplymotors with a three-element Hall effect position sensor element outputs a digital high level for 180electrical degrees of electrical rotation, and a low levelfor the other 180 electrical degrees. The three sensorsare offset from each other by 60 electrical degrees sothat each sensor output is in alignment with one of theelectromagnetic circuits. A timing diagram showing therelationship between the sensor outputs and therequired Motor drive voltages is shown in Figure 2:SENSOR VERSUS DRIVE TIMINGA+V-VFloatB+V-VFloatC+V-VFloatHLHL HLS ensor ASensor BSensor 2002-2011 Microchip Technology 3AN857 The numbers at the top of Figure 2 correspond to thecurrent phases shown in Figure 1.
9 It is apparent fromFigure 2 that the three sensor outputs overlap in sucha way as to create six unique three-bit codes corre-sponding to each of the drive phases. The numbersshown around the peripheral of the Motor diagram inFigure 1 represent the sensor position code. The northpole of the rotor points to the code that is output at thatrotor position. The numbers are the sensor logic levelswhere the Most Significant bit is sensor C and the LeastSignificant bit is sensor A.
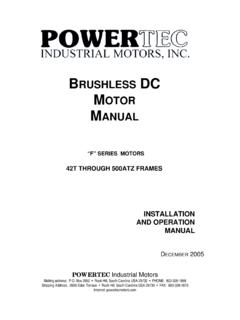
10 Each drive phase consists of one Motor terminal drivenhigh, one Motor terminal driven low, and one Motor ter-minal left floating. A simplified drive circuit is shown inFigure 3. Individual drive controls for the high and lowdrivers permit high drive, low drive, and floating drive ateach Motor terminal. One precaution that must betaken with this type of driver circuit is that both high sideand low side drivers must never be activated at thesame time. Pull-up and pull-down resistors must beplaced at the driver inputs to ensure that the drivers areoff immediately after a microcontroller Reset, when themicrocontroller outputs are configured as high-imped-ance precaution against both drivers being active atthe same time is called dead-time Control .