Transcription of Single-Shunt Three-Phase Current Reconstruction Algorithm ...
1 2009 Microchip Technology 1AN1299 INTRODUCTIONA large number of motor control applications areconsistently and continuously looking for methods toimprove efficiency while reducing system cost. Theseare the two main factors that are driving the efforts toimprove existing motor control techniques, such astrapezoidal control, scalar control and Field-OrientedControl (FOC).FOC has become more popular in recent years due tothe fact that the cost required to implement thistechnique is no longer a constraint. The availabletechnology and manufacturing process now make itpossible to implement this control technique in a 16-bitfixed-point machine such as the dsPIC Digital SignalController (DSC).Efficiency is another reason that has allowed FOC togain ground over scalar and trapezoidal controltechniques on low-cost and mid-cost applications.
2 It isalso well suited in applications in which hardrequirements are low noise, low torque ripple and goodtorque control over a vast speed control can be implemented usingposition sensors such as encoders, resolvers or Hallsensors. However, not all motor control applicationsrequire such granularity given by a resolver or encoder;and, in many cases, they do not require control at applications are a perfect target for usingsensorless techniques in which the motor position canbe estimated using the information provided by thecurrents flowing through the motor coils. There are twopopular approaches to this sensing technique: thedual-shunt resistor and the Single-Shunt dual-shunt resistor technique utilizes theinformation contained in the Current flowing throughtwo motor coils in order to estimate the motor Single-Shunt resistor technique utilizes only theinformation contained in the Current flowing through theDC bus to reconstruct the Three-Phase currents, andthen estimate motor this application note, the Single-Shunt approach isdiscussed.
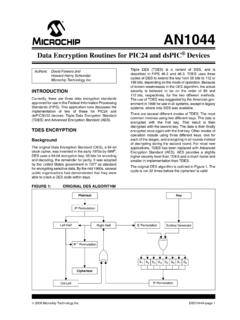
3 For information on the dual-shunt resistorapproach, please refer to the application note, AN1078 Sensorless Field Oriented Control of PMSM Motors . Current MEASUREMENTThe information contained in the Current flowingthrough the motor coils allows a motor control algorithmto operate the motor in a region where the motorproduces the maximum torque, or to operate the motorat certain performance, or even to be able toapproximate or estimate internal motor variables suchas AC Induction Motors (ACIMs),Permanent Magnet Synchronous Motors (PMSMs) andBrushless Direct Current (BLDC) motors in particularuse a Three-Phase inverter as the topology ofpreference. This topology, which is shown in Figure 1,allows individual control of the energy applied to eachcoil, which enables the motor to be efficiently 1: Three-Phase INVERTER TOPOLOGYA uthors: Daniel Torres and Jorge ZambadaMicrochip Technology BusThree-Phase ACMotorSingle-Shunt Three-Phase Current Reconstruction Algorithm for Sensorless FOC of a PMSMAN1299DS01299A-page 2 2009 Microchip Technology Three-Phase inverter is compounded by three leg contains two electronic switches that arearranged in such a way that create a half-bridgetopology.
4 Therefore, Current can flow in both directionsto and from the legs. The electronic switches can beeither power MOSFETs or MOSFET and IGBT manufacturingtechnologies have allowed digital controllers to takeadvantage of Pulse-Width Modulation (PWM)techniques to control the amount of energy applied toeach coil. The most common techniques used are sinusoidalmodulation, third-harmonic modulation and SpaceVector Modulation (SVM). These PWM techniques aresuitable to operate the electronic switches in saturationmode, which helps to increase system efficiency. In order to determine the amount of Current flowingthrough the coils, a shunt resistor is required on eachcoil. A typical Three-Phase inverter with currentmeasurement on three phases is shown in Figure 2:CIRCUIT FOR MEASURING Current IN THREE PHASESA ssuming there is a balanced load, we can considerthat the sum of the three phases is equal to zero, asdescribed by Kirchhoff s Current Law.
5 This law isshown in Equation 1:KIRCHHOFF S Current LAWT herefore, by measuring only two, the third can besolved using Equation 1. A simplified version using twoshunt resistors is shown in Figure 3:CIRCUIT FOR MEASURING Current IN TWO PHASESThe intention of the Algorithm presented in thisapplication note is to be able to measure all threephases with a Single-Shunt resistor and a singledifferential amplifier. A circuit showing a single-shuntresistor is shown in Figure 4:CIRCUIT FOR MEASURING Current FLOWING THROUGH DC BUSVBUS3 ~ICIBIAIA + IB + IC = 0 VBUS3 ~IBIAIC = -IB -IAVBUS3 ~IBUS 2009 Microchip Technology 3AN1299 ADVANTAGES AND DISADVANTAGES OF USING A Single-Shunt RESISTOR AdvantagesAs previously mentioned, one of most importantreasons for Single-Shunt Three-Phase Reconstruction iscost reduction.
6 Which in turn, simplifies the samplingcircuit to one shunt resistor and one addition to cost reduction benefits, the single-shuntalgorithm allows the use of power modules that do notprovide individual ground connection of each phase. Another benefit of Single-Shunt measurement is thatthe same circuit is being used to sense all threephases. Gains and offset will be the same for allmeasurements, which eliminates the need to calibrateeach phase amplification circuit or compensate Single-Shunt measurements, a modification onthe sinusoidal-modulation pattern needs to be made inorder to allow Current to be measured. This patternmodification could generate some Current ripple. Dueto modification of patterns and correction of the samemodifications, more CPU is used to implement DETAILSIn order to drive the motor with AC signals, PWMmethods are used to drive the switching transistorsshown in the Three-Phase inverter.
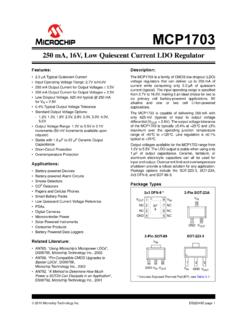
7 This modulation andresulting modulated waveform are shown in Figure sinusoidal waveform can be generated by loading aseries of duty cycle values into the PWM generatormodule. The values in the lookup table represent amodulated sine wave, so once these duty cycles arefed into the motor windings through the inverter, themotor windings will filter the switching pattern. Theresulting sine wave is shown Figure downside of a lookup table with sine values is themaximum value that can be achieved. This value islimited to 86% of the input voltage. Another sinusoidalmodulation method is Space Vector Modulation, whichis used to overcome this limitation. SVM allows 100%utilization of input voltage. SVM is described and usedin several application notes such as AN908 Using thedsPIC30F for Vector Control of an ACIM and AN1017 Sinusoidal Control of PMSM Motors with dsPIC30 FDSC.
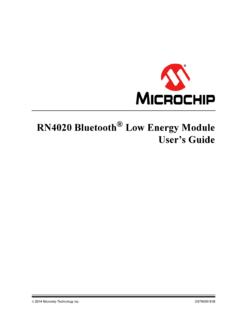
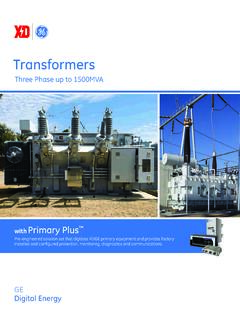
8 The typical voltage shape generated using SVMis shown in Figure 5:SINUSOIDAL MODULATIONAN1299DS01299A-page 4 2009 Microchip Technology 6:SPACE VECTOR MODULATION (SVM)When calculating the resulting voltage from line-to-line,we get three sinusoidal waveforms phase shifted 120 ,as shown in Figure 7:CALCULATED LINE-TO-LINE VOLTAGEPWM1 PWM2 PWM3100%50%0%IIIIIIIVVVISVMS ectorVA -VBVB -VCVC -VA+VBUS0V-VBUSIIIIIIIVVVISVMS ector 2009 Microchip Technology 5AN1299 SVM and Current Measurement RelationshipWhen measuring Current through a single-shuntresistor, the state of the bottom switches is critical. Toshow this, Sector I of SVM is magnified in Figure 8. Inaddition, PWM waveforms on each switching transistorare also observe the relationship between PWM modulationand Current measurement through a single-shuntresistor, let us consider PWM Cycle 2 as an we are only interested in the low-side switchPWM, we will only show the PWMxL components of thePWM (Figure 9).
9 FIGURE 8:PWM SIGNALS ON SWITCHING TRANSISTORS IN SECTOR IFIGURE 9:SAMPLING TIME WINDOWS FOR MEASURING CURRENT100%50%0%PWM1 PWM2 PWM3 PWM1 HPWM1 LPWM2 HPWM2 LPWM3 HPWM3 LPWMCYCLE12563478 PWM1 LPWM2 LPWM3LT0T1T2T3T2T1T0AN1299DS01299A-page 6 2009 Microchip Technology at the Three-Phase inverter, we will analyze allof the different PWMxL combinations (T0, T1, T2 andT3) for this period to see what the currentmeasurement represents. Starting with T0, we have thefollowing combination of the electronic switches(MOSFETs or IGBTs) in the inverter, where we see thatthere is no Current flowing through the single-shuntresistor (Figure 10).FIGURE 10:NO Current FLOWING THROUGH THE SHUNT RESISTORM oving on to T1, we see that PWM2L is active, whilePWM1H and PWM3H are active as well (not currentlyshown, but assuming PWM outputs arecomplementary).
10 Since there is Current flowing into themotor through phases A and C, and coming out ofphase B, we can consider this Current measurement torepresent IB, as shown in Figure 11: Current IB FLOWING THROUGH THE SHUNT RESISTORD uring T2, PWM2L and PWM3L are active, andPWM1H is active. This combination gives us Current IAflowing through the Single-Shunt as shown in Figure 12: Current IA FLOWING THROUGH THE SHUNT RESISTORT3 is the same scenario as T0, where there is nocurrent flowing through the shunt resistor; therefore,IBUS = 0 as shown in Figure 13:NO Current FLOWING THROUGH THE SHUNT RESISTORThe pattern repeats the second half of the PWM at a complete PWM cycle, there are twowindows of time where Current represents an actualphase Current . In this example IB and IA weremeasured in one PWM cycle.