Transcription of Soft Robotics: From Torque Feedback Controlled …
1 soft Robotics: From Torque Feedback Controlled LightweightRobots toIntrinsically Compliant SystemsA. Albu-Sch affer, O. Eiberger, M. Grebenstein, S. Haddadin, Ch. Ott, T. Wimb ock, S. Wolf, and Gerd HirzingerInstitute of Robotics and MechatronicsGerman Aerospace Center (DLR)I. INTRODUCTIONA fter decades of intensive research, it seems that weget closer to the time when robots will finally leave thecages of industrial robotic workcells and start working inthe vicinity of and together with humans. This is not onlybelieved by robotics researchers, but meanwhile also byleading automotive and IT companies, and of course bysome clear-sighted industrial robot manufacturers. Severaltechnologies required for this new kind of robots reached thenecessary level of performance, computing power, com-munication technologies, sensors, and electronics , it is clear that these human friendly robots will lookvery different from today s industrial robots.
2 Rich sensoryinformation, light-weight design and soft robotics featuresare required in order to reach the expected performanceand safety during interaction with unknown environmentsor with humans. In this paper we will present and comparetwo approaches for reaching the aforementioned soft roboticsfeatures. The first one is the meanwhile mature technologyof Torque Controlled light-weight robots developed duringthe past decade at DLR (arms, hands, a humanoid upperbody, a crawler). Several products resulted from this researchand are currently being commercialized through cooperationswith different industrial partners (DLR-KUKA LightweightRobot, DLR-HIT-Schunk Hand, DLR-Brainlab-KUKA med-ical robot ). The second technology, still a topic of worldwideongoing research, is variable compliance actuation whichimplements the soft robotics features mainly in will start by reviewing the main design and control ideasof actively Controlled compliant systems using as examplesthe DLR arms, hands, and the humanoid manipulator are taking these robots as a performance reference, whichwe are currently trying to outperform with new variablestiffness actuators.
3 This will lead us to the motivation ofthe variable stiffness actuator design. We will present themain design ideas and our first results with the new actua-tor prototypes. Some experimental examples providing firstvalidation of the performance and safety gain of this designapproach finally will be MECHATRONICLIGHT-WEIGHTROBOTDESIGN WITHJOINTTORQUESENSINGIn this section a mechatronic design approach for obtainingrobots with the desired light-weight and performance prop-erties is briefly described. Following aspects are of particularrelevance: Light-weight structures. Light-weight metals or com-posite materials are used for the robot links. High energy motors. In contrast to industrial robots,not high velocity motors, but motors with high torqueat moderate speed, low energy loss and fast dynamicresponse are of interest.
4 For that purpose special motors,the DLR-Robodrive, have been designed. Gearing with high load/weight ratio. HarmonicDrivegears are used. Integration of electronics into the joint structure, leadingto a modular design. This allows the design of robotsof increasing kinematic complexity based on integratedjoints as in the case of the DLR humanoid , one obtains a self-contained system, wellsuited for autonomous, mobile applications. Full state measurement in the joints. As will be outlinedin Sec. III, our robots use Torque sensing in additionto position sensing, in order to implement compliantbehavior and a smooth, vibration-free motion. The fullstate measurement in all joints is performed at a 3kHzcycle, using strain gauge-based Torque -sensing, motorposition sensing based on magneto-resistive encoders,and link-side position sensing based on potentiometers(used only as an additional sensors for safety consider-ations).
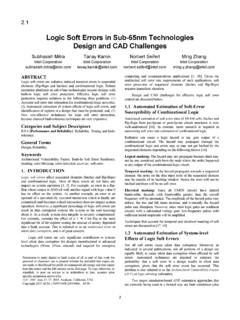
5 Sensor redundancy for safety ( , for position, forces,torques).These basic design ideas are used for the joints of arms,hands, and the torso of the upper body system Justin (Fig. I).Moreover, due to the fact that the joints are self-contained,it is straight-forward to combine these modules to obtaindifferent kinematic configurations. For example, the fingershave been used to build up a crawler prototype. Fig. 2 showsthe exploded view of one lightweight robot III (DLR-LWRIII) COMPLIANCECONTROL FORLIGHT-WEIGHTARMSIn the next two sections, the framework used to implementactive compliance control based on joint Torque sensing issummarized. The light-weight design is obtained by usingrelatively high gear reduction ratios (typically 1:100 or1:160), leading to joints which are hardly backdrivable and1 2 3 4 5 6 Fig.
6 1. Overview of the DLR Robots:1 : The DLR-LWRIII equipped with the : The DLR-KUKA-LWRIII which is based on the : The DLR Humanoid Manipulator Justin .4 : The DLR-HandII-b, a redesign of the : The DLR-HIT Hand, a commercializedversion of the : The DLR-Crawler, a walking robot based on the fingers of the mechatronic joint design of the DLR-LWRIII includingactuation, electronics, and already moderate intrinsic compliance. Therefore wemodel the robot as a flexible joint system. Thus, measuringthe Torque after the gears is essential for implementinghigh performance soft robotics features. When implementingcompliant control laws, the Torque signal is used for reducingboth, the effects of joint friction as well as to damp vibrationsrelated to the joint compliance.
7 Motor position Feedback isused to impose the desired compliant behavior. The controlframework is constructed from a passivity control perspec-tive, by giving a simple and intuitive physical interpretationin terms of energy shaping to the Feedback of the differentstate vector components. A physical interpretation of the joint Torque feedbackloop is given as the shaping of the motor inertia. The Feedback of the motor position can be regarded asshaping of the potential Joint Torque Control: Shaping the Actuator Kinetic En-ergyIn order to simplify the analysis and to be able togeneralize the joint level approach also to Cartesiancoordinates, the idea of interpreting the joint torquefeedback as the shaping of the motor inertia plays a centralrole [1], [2].
8 It enables to directly use the Torque feedbackwithin the passivity framework and conceptually divides thecontroller design into two steps. One is related to the torquefeedback and the other to the position Feedback , see Fig. sketched in the figure and presented in detail in [1], [2],the effect of the Torque control loop is the reduction of theapparent motor inertia to a valueB , lower than the friction is not depicted in Fig. 3, note that the frictional effectwill be reduced by the same factorB 1 B. muB , torquecontrolrigid robot dynamicsDKpassiveenvironment a extimpedancelawg(q)qdynamics passive subsystemq( )Fig. 3. Representation of the compliance Controlled robot asa connectionof passive blocks. is the motor position andqthe link ,KandDare the motor inertia, joint stiffness, and damping matrices, respectively.
9 Is the elastic joint Torque , athe total (elastic and damping) joint Torque , extthe external Torque , andgthe gravity Motor Position Based Feedback : Shaping the PotentialEnergyUsing motor position for control and not the linkpositionqis essential for the passivity properties of thecontroller. However, the desired position and stiffness areusually formulated in terms of the link position. For theimpedance controllers of the DLR light-weight robots, theposition Feedback has the formu= VP( q( )) D +g( q( ))(1)withubeing the input to the Torque controller,VPapositive definite potential function, andD a positive definitedamping matrix chosen for a well damped transient behavior[3]. This is the classical structure of a compliance controllerfor rigid robots, except for the fact that, instead of the linkpositionq, a position signal q( )is used, which isstaticallyequivalenttoq, q( ) =qif q= =0and can becomputed numerically2[1], [2].
10 Since now the position Feedback is again only a function of , the passivity of the Controlled robot is given with respectto the input-output pair( ext, q), see Fig. order to obtain a joint level impedance controller, onecan simply useVP( q) =12(qd q)TKJ(qd q), while forCartesian impedance controlVPis defined as function of theCartesian coordinatesx( q)as detailed in section Sec. external Torque extis then replaced by the externalforce3 Fext. A Lyapunov function for the system is obtainedby summing the kinetic and the gravity-potential energy ofthe rigid part of the robot dynamics with the kinetic energyof the scaled motor inertia and the potential energy of thecontroller [1], [2].IV. IMPEDANCECONTROL FORCOMPLEXKINEMATICCHAINSIn this section we show how to apply the impedancecontrol concept from the previous section to kinematically2In practice we often use indeed the trivial approximation q( ) = forapplications in which high position accuracy is not relation between the external tip forceFextand the external jointtorque extis ext=J( q) ( q)Khc,1 Khc,2 Khc,3 Khc,4 Hho,dKho Vs qFig.