Transcription of VF Control of 3-Phase Induction Motors Using PIC16F7X7 ...
1 AN889. VF Control of 3-Phase Induction Motors Using PIC16F7X7 Microcontrollers Author: Rakesh Parekh VF Control . Microchip Technology Inc. A discussion of Induction motor Control theory is beyond the scope of this document. We will mention INTRODUCTION here only the salient points of VF Control . The base speed of the Induction motor is directly An Induction motor can run only at its rated speed when proportional to the supply frequency and the number of it is connected directly to the main supply. However, poles of the motor . Since the number of poles is fixed many applications need variable speed operations. by design, the best way to vary the speed of the This is felt the most in applications where input power Induction motor is by varying the supply frequency.
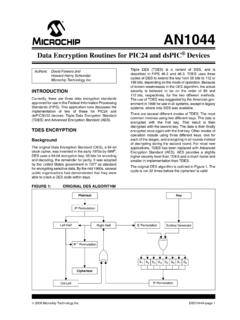
2 Is directly proportional to the cube of motor speed. In applications like the Induction motor -based centrifugal The torque developed by the Induction motor is directly pump, a speed reduction of 20% results in an energy proportional to the ratio of the applied voltage and the savings of approximately 50%. frequency of supply. By varying the voltage and the fre- quency, but keeping their ratio constant, the torque Driving and controlling the Induction motor efficiently developed can be kept constant throughout the speed are prime concerns in today's energy conscious world. range. This is exactly what VF Control tries to achieve. With the advancement in the semiconductor fabrication technology, both the size and the price of semiconduc- Figure 1 shows the typical torque-speed characteristics tors have gone down drastically.
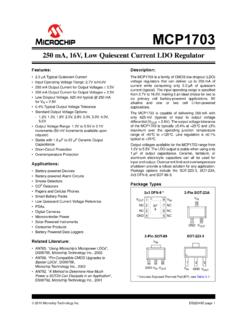
3 This means that the of the Induction motor , supplied directly from the main motor user can replace an energy inefficient mechani- supply. Figure 2 shows the torque-speed characteristics cal motor drive and Control system with a Variable of the Induction motor with VF Control . Frequency Drive (VFD). The VFD not only controls the Other than the variation in speed, the torque-speed motor speed, but can improve the motor 's dynamic and characteristics of the VF Control reveal the following: steady state characteristics as well. In addition, the The starting current requirement is lower. VFD can reduce the system's average energy consumption. The stable operating region of the motor is increased.
4 Instead of simply running at its base Although various Induction motor Control techniques rated speed (NB), the motor can be run typically are in practice today, the most popular Control tech- from 5% of the synchronous speed (NS) up to the nique is by generating variable frequency supply, which base speed. The torque generated by the motor has constant voltage to frequency ratio. This technique can be kept constant throughout this region. is popularly known as VF Control . Generally used for At base speed, the voltage and frequency reach open-loop systems, VF Control caters to a large num- the rated values. We can drive the motor beyond ber of applications where the basic need is to vary the the base speed by increasing the frequency motor speed and Control the motor efficiently.
5 It is also further. However, the applied voltage cannot be simple to implement and cost effective. increased beyond the rated voltage. Therefore, The PIC16F7X7 series of microcontrollers have three only the frequency can be increased, which on-chip hardware PWM modules, making them results in the reduction of torque. Above the base suitable for 3-Phase motor Control applications. This speed, the factors governing torque become application note explains how these microcontrollers complex. can be used for 3-Phase AC Induction motor Control . The acceleration and deceleration of the motor can be controlled by controlling the change of the supply frequency to the motor with respect to time.
6 2004 Microchip Technology Inc. DS00889B-page 1. AN889. FIGURE 1: TORQUE-SPEED CHARACTERISTICS OF Induction motor . Breakdown Torque Torque Current Full Load Torque Locked Rotor Torque Torque and Current TRATED. IRATED. Pull-up Torque NB NS. Slip Speed FIGURE 2: TORQUE-SPEED CHARACTERISTICS OF Induction motor WITH VF Control . Torque Voltage VRATED. Torque and Voltage VMIN. fmin frated fmax (Base Speed). Frequency DS00889B-page 2 2004 Microchip Technology Inc. AN889. motor DRIVE harmonics. The inductive nature of the motor 's stator windings filters this supplied current to produce a The 3-Phase Induction motor is connected to a 3-Phase 3-Phase sine wave with negligible harmonics.
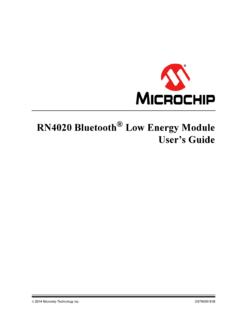
7 When inverter bridge as shown in Figure power inverter switches are turned off, the inductive nature of the has 6 switches that are controlled in order to generate windings oppose any sudden change in direction of 3-Phase AC output from the DC bus. PWM signals, flow of the current until all of the energy stored in the generated from the microcontroller, Control these 6 windings is dissipated. To facilitate this, fast recovery switches. Switches IGBTH1 through IGBTH3, which diodes are provided across each switch. These diodes are connected to DC+, are called upper switches. are known as freewheeling diodes. Switches IGBTL1 through IGBTL3, connected to DC-, To prevent the DC bus supply from being shorted, the are called lower switches.
8 Upper and lower switches of the same half bridge The amplitude of phase voltage is determined by the should not be switched on at the same time. A dead duty cycle of the PWM signals. While the motor is run- time is given between switching off one switch and ning, three out of six switches will be on at any given switching on the other. This ensures that both switches time; either one upper and two lower switches or one are not conductive at the same time as each one lower and two upper switches. The switching produces changes states. a rectangular shaped output waveform that is rich in FIGURE 3: 3-Phase INVERTER BRIDGE. DC+. IGBTH1 IGBTH2 IGBTH3. 3-PH.
9 Induction motor IGBTL1 IGBTL2 IGBTL3. DC- 2004 Microchip Technology Inc. DS00889B-page 3. AN889. Control half bridge of the inverter: one to the upper switch, the other to the lower switch. The driver also adds a fixed Members of the PIC16F7X7 family of microcontrollers dead time between the two PWM signals. have three 10-bit PWMs implemented in hardware. The duty cycle of each PWM can be varied individually to 3-Phase Sine Waveform Synthesis generate a 3-Phase AC waveform as shown in Figure 4. The upper eight bits of the PWM's duty cycle Along with the three PWM modules, the 16-bit Timer1. is set Using the register CCPRxL, while the lower two hardware module of PIC16F7X7 is used to generate bits are set in bits 4 and 5 of the CCPxCON register.
10 The Control signals to the 3-Phase inverter. The PWM frequency is set Using the Timer2 Period reg- This is done by Using a sine table, stored in the ister (PR2). Because all of the PWMs use Timer2 as program memory with the application code and their time base for setting the switching frequency and transferred to the data memory upon initialization. duty cycle, all will have the same switching frequency. Loading the table this way minimizes access time To derive a varying 3-Phase AC voltage from the DC during the run time of the motor . Three registers are bus, the PWM outputs are required to Control the six used as the offset to the table. Each of these registers switches of the power inverter.










![tkfO{n] s] yfxf kfpg cfaZos 5 - Immunization Action Coalition](/cache/preview/7/9/6/1/1/7/6/5/thumb-7961176524a95f4df49989a791f758e8.jpg)