
STATE-FEEDBACK CONTROL
STATE-FEEDBACK CONTROL 6.1: State-feedback control We are given a particular system having dynamics x.t/P D Ax.t/CBu.t/ y.t/D Cx.t/CDu.t/: We know that open-loop system poles are given by eigenvalues of A. Want to use input u.t/ to change the dynamics. Will assume the form of linear state feedback with gain vector K u.t/ D r.t/!Kx.t/; K2 R1"n:
Download STATE-FEEDBACK CONTROL

Information
Domain:
Source:
Link to this page:
Documents from same domain
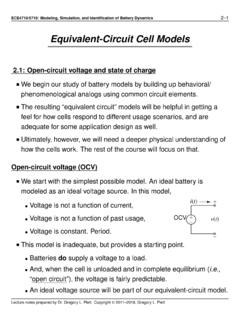
Equivalent-Circuit Cell Models
mocha-java.uccs.edu• Voltage is constant. Period. OCV v(t) i(t) − − + + This model is inadequate, but provides a starting point. • Batteries do supply a voltage to a load. • And, when the cell is unloaded and in complete equilibrium (i.e., “open circuit”), the voltage is fairly predictable. • An ideal voltage source will be part of our equivalent ...
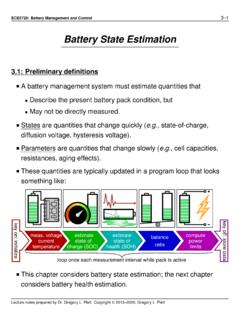
Battery State Estimation
mocha-java.uccs.eduModel-based state estimators implement algorithms that use sensor measurements to infer the internal hidden state of a dynamic system. System Model Measured Output Predicted Output Input Process Noise Sensor Noise True System State State Est. A mathematical model of the system is assumed known. Same input propagated through true system and model.

FREQUENCY-RESPONSE ANALYSIS
mocha-java.uccs.edufrequency-response for a specific frequency from the plot. We will see later that the polar plot will help us determine st ability properties of the plant and closed-loop system. Plot method #2: Magnitude and phase plots We can replot the data by separating the plots for magnitude a nd phase making two plots versus frequency.

State-Space Models and the Discrete-Time Realization …
mocha-java.uccs.eduDiscrete-Time Realization Algorithm 5.1: Introduction to state-space models The coupled PDEs derived in earlier chapters of notes are too complex to be used in real-time applications. •They are “infinite dimensional.” For every point in time t, there are an infinite number of x- and r- dimension variables to solve for. •i.e., c s(x,r ...
Related documents

Chapter 5 Dynamic and Closed-Loop Control
cwrowley.princeton.eduFeedback control has been used for centuries to regulate engineered systems. In the 17th century, Cornelius Drebbel invented one of the earliest devices to use feed-back, an incubator that used a damper controlled by a thermometer to maintain a constant temperature. 1. Feedback devices became more prevalent during the indus-

The Power of Feedback - Columbia University
www.columbia.edufeedback interventions that were not confounded with other manipulations, included at least a control group, measured performance, and included at least 10 participants. Many of their studies were not classroom based. From the 131 studies, they estimated 470 effect sizes on the basis of 12,652 participants and 23,663 observations (reflect-

Types of Control: Open loop, feedback, feedforward
www.clear.rice.eduWhy use feedback control • or better, why do you need a control system at all? • consider ovens, A/C units, airplanes, manufacturing, pumping stations, etc • What are we controlling? some physical quantity (constant) a dynamic behavior (a function of time) • We need to 'tell' the system how we want it to behave

Hand Hygiene: Education, Monitoring and Feedback
www.cdc.govfeedback on adherence to hand hygiene in the healthcare setting. Your facility is likely having ongoing discussions about hand hygiene. The word cloud on the right visually represents words and phrases collected from frontline healthcare personnel in conversations about improving hand hygiene with the most

Auditing and Feedback of PPE Use - Centers for Disease ...
www.cdc.govfeedback, if you notice errors in PPE use or your auditing reveals user gaps. This slide identifies the three essential components of feedback: it must be specific, it must be timely and it must be given in a non-threatening manner.

Systems Analysis and Control
control.asu.eduRouth’s Method Step 3 Complete the third row. Call the new entries b 1; ;b k I The third row will be the same length as the rst two b 1 = det 4 a a 2 a 3 a 1 0 a 3 b 2 = det 4 a a a 3 0 a 3 b 3 = det a 4 0 a 3 0 a 3 The denominator is the rst entry from the previous row.

16.30 Topic 5: Introduction to state-space models
ocw.mit.eduSep 21, 2010 · 16.30/31 Feedback Control Systems State-Space Systems • What are state-space models? • Why should we use them? • How are they related to the transfer functions used in classical control design and how do we develop a state-space model? • What are the basic properties of a state-space model, and how do we analyze these? •

16.30 Topic 11: Full-state feedback control
ocw.mit.eduOct 17, 2010 · So the feedback control can modify the pole at s = 1, but it cannot move the pole at s = 2. • System cannot be stabilized with full-state feedback. • Problem caused by a lack of controllability of the e2t mode.

Feedback Control Theory - University of Toronto
www.control.utoronto.caof feedback control system design that captures the essential issues, can be applied to a wide range of practical problems, and is as simple as possible. 1.1 Issues in Control System Design The process of designing a control system generally involves many steps. A …