Transcription of Chapter 9 Rigid Body Motion in 3D - RIT - People
1 Chapter 9 Rigid body Motion in 3 DRigid body rotation in 3D is a complicated problem requiring the introduction of completion of this Chapter we will be able to describe such things as the Motion ofa top, or of a Rotation of body about an arbitrary axis Moments andProducts of Inertia, Inertia Tensor, Angular Momentumand Kinetic EnergyConsider an arbitrary Rigid object and a set ofxyzaxes. Our first task will be to find themoment of inertia about an axis passing through the origin but oriented in an arbitrarydirection, not one of the coordinate axes. The line is bidirectional, but once we set theobject into rotation the vector~ will define a unique Chapter 1 we discussed direction cosines.
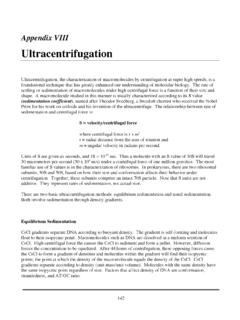
2 Angles , , are the angles between a vectorand thexyzaxes (pages 16, 17 of the text) so thatAx=Acos to Figure that shows the object, thez-axis of the coordinate system, a rotationaxis with~ , and a small piece of the object labeledmia distance~rfrom the origin, withmoment armri from the axis. It has a velocity~vithat is perpendicular to both~riand~ .The scalar moment of inertia of the object about the rotation axis is by definitionI= mir2i (1)where we have used a summation, but we could easily move to continuous mass distributionsand do an we want to express this in terms of the cartesian coordinatesxi,yi,ziand the 1: Rigid body rotating about a general axis, not one of the coordinate axes.
3 Unitvector for axis set by angular velocity is nOne infinitesimal piece of object is the unit vector nas~ = n. We can recognize thatri =|risin i|=|~ri n|(2)where iis the angle between the axis of rotation nand the radius vector~ position of the infinitesimal mass is~ri=xi i+yi j+zi k. The unit vector can be writtenin terms of the cartesian unit vectors and the direction cosines n= icos + jcos + kcos (3)and using this and some algebrar2i =|~ri n|2= (yicos zicos )2+ (zicos xicos )2+ (xicos yicos )2= (y2i+z2i) cos2 + (z2i+x2i) cos2 + (x2i+y2i) cos2 2yizicos cos 2zixicos cos 2xiyicos cos (4)Hence the moment of inertia relative to the axis of rotation isI= mi(y2i+z2i) cos2 + mi(z2i+x2i) cos2 + mi(x2i+y2i) cos2 2 miyizicos cos 2 zixicos cos 2 xiyicos cos (5)Wow.
4 A seemingly small change results in a really messy expression. We can recognizethe terms in the first line as containing moments of inertia about the coordinate axes, andmodify our notation to have double subscripts:Ixx= mi(y2i+z2i)moment of inertia aboutx axis(6)Iyy= mi(z2i+x2i)moment of inertia abouty axis(7)Izz= mi(x2i+y2i)moment of inertia aboutz axis(8)2 The sums involving products will be called theproducts of inertia. Our text includes thenegative sign in the definition other texts define the products as positive mixiyi(9)Iyz=Izy= miyizi(10)Ixz=Izx= mixizi(11)Hence we can writeI=Ixxcos2 +Iyycos2 +Izzcos2 +2 Ixycos cos + 2 Iyzcos cos + 2 Ixzcos cos (12)It is much more compact to cast this into tensor/vector the unit vector nas a column vector, n= cos cos cos (13)The transpose of this vector is a row vector n= (cos cos cos )(14)For the moment of inertia tensor useI= IxxIxyIxzIyxIyyIyzIzxIzyIzz (15)where we know relations likeIxy=Iyx.
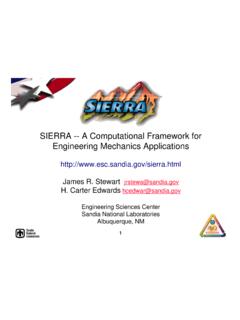
5 The scalar moment of inertia can be found bysimple matrix multiplicationI= nI n(16) Moment of inertia tensor of a rectangular laminaConsider a rectangular lam-ina lying in thex-yplane with lengthain thexand 2ain they. Find the momentof inertia tensor relative to these coordinates. We can write the surface density =m/2a2. The moments of inertia about the coordinate axes can be written fromprevious work,Ixx= (1/3)m(2a)2= (4/3)ma2, Iyy= (1/3)ma2and from the per-pendicular axis theorem,Izz=Ixx+Iyy= (5/3) 2: A uniform rectangular lamina of dimensionsaby 0 for the lamina, two products of inertiaIxz=Iyz= 0.
6 So now we justneed to a0 2a0 xy dxdy(17)= m2a2 a0xdx 2a0y dy(18)= 12ma2(19)So the tensor isI= 43ma2 12ma20 12ma213ma200053ma2 (20)Find the scalar moment of inertia for the rectangular laminawith an axis at 37 to thex-axisThe direction cosines are cos = cos 37 = , cos = cos 53 = , cos = 0 soneed to evaluateI= ( 0) 43 120 121300053 ma2 = (21) Angular Momentum Vector and Dyad ProductsWe now introduce a new vector product. Recall that the dot product of two vectors gavea scalar and the cross product gave a vector. Thedyad product1of two vectors will givea tensor via~A~B AxBxAxByAxBzAyBxAyByAyBzAzBxAzByAzBz (22)1 See Wikipedia, more unit tensor (be sure you can distinguish one1andI) will be1= 1 0 00 1 00 0 1 = i i+ j j+ k k(23)The product of a unit tensor with a vector returns the vector:1~ =~ where putting thetensor next to the vector impies the usual matrix-vector multiplication.
7 Note that the textoften (but not always I think) puts a between the tensor and vector. I will usuallyreserve the dot for dot products of dyad properties these are shown in the text. Dyad product with vector (yields a vector): (~a~b)~c=~a(~b ~c) Commutation rule:~a~b= (~b~a) Dyad between vectors (yields a scalar): ~d(~a~b)~c= ( ~d~a)( ~b~c) = (~d ~a)(~b ~c)Now we want to write the relation between angular momentum vector and the angularvelocity vector. In Chapter 8, with a fixed axis and generally symmetrical objects, thiswas just~L=I~ . The general case is considerably more will do it with summations.
8 We know that~vi=~ ~ri. The angular momentumis~L= ~ri mi~vi= [mi~ri (~ ~ri)](24)and expanding the triple cross product as discussed in Chapter 1 (BAC - CAB)~L= mir2i~ mi~ri(~ri ~ )(25)=[( mir2i1) (mi~ri~ri)]~ (26)This takes a bit to process, but with a little work you should see that it we write the relation between angular momentum and angular velocity in tensorform:~L= mi x2i+y2i+z2i000x2i+y2i+z2i000x2i+y2i+z2i ~ mi x2ixiyixizixiyiy2iyizixiziyiziz2i ~ = mi y2i+z2i xiyi xizi yixix2i+z2i yizi xizi yizix2i+y2i ~ =I~ (27)This should tell you thatThe direction of the angular velocity and the direction of theangular momentum are not, in general, the same!
9 Find angle between angular momentum and angular velocityfor the rect-angular lamina rotating about an axis at 37 to thex-axis. First compute~L:~L= 43 120 121300053 ma2 = ma2 (28)The magnitude of this ( ~L~L) is and since~L ~ =L cos we can find = 51 .Be sure to look at the examples in the text, and , for a square lamina and rotationabout (a) thex-axis and (b) the diagonal. In the case of the diagonal, the angle is just 0,and we will shortly describe this as one of the principal axes of the Rotational Kinetic Energy Using TensorsFirst consider an object in pure rotation, and use the relation~vi=~ ~riTrot= 12mi~vi ~vi=12 (~ mi~ri) ~vi(29)But (~A ~B) ~C=~A (~B ~C) from Chapter 1.
10 HenceTrot=12 ~ (mi~ri ~vi)(30)=12~ (mi~ri ~vi)(31)=12~ ~L(32)=12 ~ I (33) Kinetic Energy of Rectangular Plate about 37 Evaluating this givesTrot=12( )ma2 2(34)and this is just what we get using the scalar moment of Principal Axes of a Rigid BodyThe origin of our coordinates may be fixed in a problem, but the orientation of the axes isusually our choice. We can always find some orientation in which the products of inertia6are all zero and thus the moment of inertia tensor is diagonal. In this case the diagonalelements are called theprincipal moments, and the axes are called theprincipal axes.