Example: dental hygienist
Chapter 14 Review of Quantization - Chester F. Carlson ...
hold circuits. The simplest quantizer converts an analog input voltage to a 1-bit digital output and can be constructed from an ideal di fferential amplifier, where the output voltage Voutis proportional to the difference of two voltages Vinand Vref: Vout= α(Vin−Vref) Vref is a reference voltage provided by a known source. If αis large ...
Tags:
Information
Domain:
Source:
Link to this page:
Documents from same domain

Traveling Waves - Chester F. Carlson Center for Imaging ...
www.cis.rit.edu32 CHAPTER 4. TRAVELING WAVES amplitudes over a discrete set of frequencies: y[z,t]= X∞ n=1 y n X∞ n=1 Ancos[knz−ωnt+φ], where An,kn,andωnare the amplitude, angular spatial frequency, and angular spatial frequency of the nthwave.Therefore, we can define the phase velocity of the nthwave as: (vφ)n ωn kn Now suppose that a particular anharmonic oscillation is …

Chapter 6 Maxwell’s Equations for Electromagnetic Waves
www.cis.rit.eduChapter 6 Maxwell’s Equations for Electromagnetic Waves 6.1 Vector Operations Any physical or mathematical quantity whose amplitude may be decomposed into “directional” components often is represented conveniently as a vector. In this dis-cussion, vectors are denoted by bold-faced underscored lower-case letters, e.g., x.The

Propagation of Waves - RIT Center for Imaging Science
www.cis.rit.eduPROPAGATION OF WAVES 7.1.2 Cylindrical Waves If a wave is emitted from a line source, the wavefronts are cylindrical. Since the wave expands to Þll a cylinder of radius r0, the wavefront crosses a cylindrical area that grows as Area =2πrh ∝ r.

Correlation in Random Variables
www.cis.rit.eduRandom Process • A random variable is a function X(e) that maps the set of ex- periment outcomes to the set of numbers. • A random process is a rule that maps every outcome e of an experiment to a function X(t,e). • A random process is usually conceived of as a function of time, but there is no reason to not consider random processes that are

Lecture 3: Basic Morphological Image Processing
www.cis.rit.eduSep 13, 2005 · Morphological processing is described almost entirely as operations on sets. In this discussion, a set is a collection of pixels in the context of an image. Our sets will be collections of points on an image grid G of size N × M pixels. DIP Lecture 3 1. Pixel Location

Poisson and Normal Distributions
www.cis.rit.eduPoisson Distribution • The Poisson∗ distribution can be derived as a limiting form of the binomial distribution in which n is increased without limit as the product λ =np is kept constant. • This corresponds to conducting a very large number of Bernoulli trials with the probability p of success on any one trial being very small. • The Poisson distribution can also be derived …

Lecture 2: Geometric Image Transformations
www.cis.rit.eduSep 08, 2005 · Rochester Institute of Technology [email protected] September 8, 2005 Abstract Geometric transformations are widely used for image registration and the removal of geometric distortion. Common applications include construction of mosaics, geographical mapping, stereo and video. DIP Lecture 2
Binary Images - Chester F. Carlson Center for Imaging Science
www.cis.rit.eduIndexed color images store a fixed number of colors limited by the bit-depth: 3 bits/pixel : 8 colors 4 bits/pixel : 16 colors 5 bits/pixel:64 colors 8 bits/pixel : 256 colors. File Size Calculation 100 pixels 100 pixels Bit depth = 8 bits per pixel (256 gray levels)

Functions of Random Variables - College of Science | RIT
www.cis.rit.eduSuppose that a random variable U can take on any one of L ran-dom values, say u1,u2,...uL. Imagine that we make n indepen-dent observations of U and that the value uk is observed nk times, k =1,2,...,L.Of course, n1 +n2 +···+nL = n. The emperical average can be computed by u = 1 n L k=1 nkuk = L k=1 nk n uk The concept of statistical ...
Related documents
Op Amps for Everyone Design Guide (Rev. B)
web.mit.eduthe designer to bias circuits when the inputs are referenced to ground, and Chapter 4 ... can’t exist without feedback, and feedback has inherent stability problems, so feedback and stability are covered in Chapter 5. Chapters 6 and 7 develop the voltage ... 14 where the reader is shown how design the converter to transducer/actuator interface

SPICE-Simulation using LTspice IV
ieca-inc.comProject 6: OPA Circuits 62 10.1. Starting with an Inverting Amplifier 62 ... The Flyback Converter 73 11.4. The Step Down Converter 75 12. ... Second Example: Dirac Test of a 110MHz Lowpass Filter (see Chapter 14.2) 142 20.2.1. Simulating S21 (= Forward Transmission) 142 20.2.2. Simulation of S11 (= input reflection) or S22 (= output reflection ...

EN / FEN-31 HTL Encoder Interface User's Manual - ABB
library.e.abb.comThis chapter states the general safety instructions that must be ... minutes to discharge before working on the frequency converter, the motor or the motor cable. It is good practice to check (with a ... control circuits even when the drive mains power is shut off.

CHAPTER 10: PASSIVE COMPONENTS - Analog Devices
www.analog.comCHAPTER 10: PASSIVE COMPONENTS Introduction When designing precision analog circuits, it is critical that users avoid the pitfall of poor passive component choice. In fact, the wrong passive component can derail even the best op amp or data converter application. This section includes discussion of some basic traps of choosing passive components.

ABB drives Reference manual Grounding and cabling of drive ...
library.e.abb.comContents of this chapter This chapter gives a description of the manual. Applicability This manual is applicable for low voltage AC and DC drive systems. The drive system in this manual consists of the supply transformer, input power cable of the drive, the variable speed drive (frequency converter), motor cable and motor. Target audience
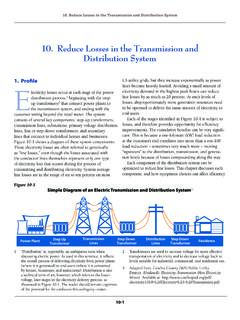
10. Reduce Losses in the Transmission and Distribution …
www.4cleanair.orgAug 10, 2014 · reduce total power consumption (see Chapter 5). Because they are transformers, they involve both core losses and resistive losses, and attention to both the materials and the sizing of these affects the level of line losses. Primary Distribution Lines. Primary lines connect substations to circuits that bring power into business
ELECTRONICS and CIRCUIT ANALYSIS using MATLAB
ee.hacettepe.edu.trCHAPTER SIX AC ANALYSIS AND NETWORK FUNCTIONS 6.1 STEADY STATE AC POWER 6.1.1 MATLAB functions quad and quad8 6.2 SINGLE- AND THREE-PHASE AC CIRCUITS 6.3 NETWORK CHARACTERISTICS 6.3.1 MATLAB functions roots, residue and polyval 6.4 FREQUENCY RESPONSE 6.4.1 MATLAB Function freqs SELECTED BIBLIOGRAPHY EXERCISES

Variable Frequency Oscillators (VFOs)
www.qrparci.org5. Chapter 10, Harris ohm load. In Chapter 6 you were introduced to Chebyshev filters designed for 50 ohms. However, here we have no need for power, just voltage. Therefore, the filter is designed for 500 ohms, which is plenty of power for this application. Values are given for both a 80 meter VFO (3.5 to 4.0 MHz) or a 5 MHz VFO (5.0 to 5.5 MHz).

Introduction to Digital Data Transmission
www.eg.bucknell.edusample to a binary number (i.e., an analog-to-digital converter). Each sample value is therefore represented by a sequence of 1s and 0s, and the communication system associ-ates the message 1 with a transmitted signal s1 (t) and the message 0 with a transmitted signal s0(t). During each signaling interval either the message 0 or 1 is ...

CHAPTER 3: SENSORS - Analog Devices
www.analog.comchapter 3: sensors section 3.1: positional sensors 3.1 linear variable differential transformers (lvdt) 3.1 hall effect magnetic sensors 3.6 resolvers and synchros 3.9 inductosyns 3.13 accelerometers 3.15 imems® angular-rate-sensing gyroscope 3.19 gyroscope description 3.19 coriolis accelerometers 3.20 motion in 2 dimensions 3.21