
MATH 304 Linear Algebra
That is, the nullspace of a matrix is the orthogonal complement of its row space. Proof: The equality Ax = 0 means that the vector x is orthogonal to rows of the matrix A. Therefore N(A) = S⊥, where S is the set of rows of A. It remains to note that S⊥= Span(S)⊥= R(AT)⊥. Corollary Let V be a subspace of Rn. Then dimV +dimV⊥ = n.
Download MATH 304 Linear Algebra

Information
Domain:
Source:
Link to this page:
Documents from same domain

Thales of Miletus1 - Texas A&M University
www.math.tamu.eduThales 2 • Thales of Miletus was the first known Greek philosopher, scientist and mathematician. Some consider him the teacher of Pythagoras, though it may be only be that he advised Pythagoras to travel to

Matrices and Linear Algebra - Texas A&M University
www.math.tamu.eduChapter 2 Matrices and Linear Algebra 2.1 Basics Definition 2.1.1. A matrix is an m×n array of scalars from a given field F. The individual values in the matrix are called entries.

Solving ODE in MATLAB - Texas A&M University
www.math.tamu.edu1.1 First Order Equations Though MATLAB is primarily a numerics package, it can certainly solve straightforward differential equations symbolically.1 Suppose, for example, that we want to solve the first

LYX 1.4.1 Basics - Texas A&M University
www.math.tamu.eduM442 LyX 1.4.1 P. Howard 3 LYX Basics 3.1 Creating a Simple Document LYX should splash up a simple logo over a gray screen. If the screen isn’t maximized, you

Partial Differential Equations in MATLAB 7 - Texas …
www.math.tamu.edufunction [pl,ql,pr,qr] = bc1(xl,ul,xr,ur,t) %BC1: MATLAB function M-file that specifies boundary conditions %for a PDE in time and one space dimension.

7KH %HJLQQLQJ - Texas A&M University
www.math.tamu.eduThe History of Infinity Definition 1. A point is that which has not part. Definition 4. A straight line is a line which lies evenly with the points on itself.

SYSTEMS OF LINEAR EQUATIONS AND 2 MATRICES
www.math.tamu.edu68 2 SYSTEMS OF LINEAR EQUATIONS AND MATRICES Systems of Equations Recall that in Section 1.4 we had to solve two simultaneous linear equations in order to find the break-even pointand the equilibrium point.

Taylor Series in MATLAB - Texas A&M University
www.math.tamu.eduTaylor Series in MATLAB First, let’s review our two main statements on Taylor polynomials with remainder. Theorem 1. (Taylor polynomial with integral remainder) Suppose a function f(x) and its

MATH 151 FALL SEMESTER 2011 COMMON …
www.math.tamu.edu4. Find the scalar projection (component) and vector projection of v 5i 12j onto w 4i 3j. a. scalar projection 16 13 vector projection 64 169 i 48 169 j b. scalar projection 16 13 vector projection 80

MATH 151, FALL 2009 COMMON EXAM II - …
www.math.tamu.eduPART II WORK OUT Directions: Present your solutions in the space provided. Show all your work neatly and concisely and Box your final answer. You will be graded not merely on the final answer, but also on the quality and correctness of the work
Related documents
The Delta Parallel Robot: Kinematics Solutions Robert L ...
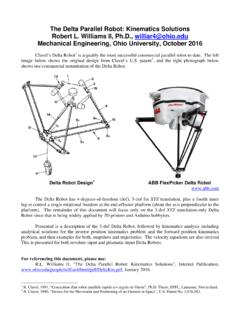
www.ohio.edu4 The three-dof Delta Robot is capable of XYZ translational control of its moving platform within its workspace. Viewing the three identical RUU chains as legs, points Bii,1,2,3 are the hips, points Aii,1,2,3 are the knees, and points Pii,1,2,3 are the ankles.The side length of the base equilateral triangle is sB and the side length of the moving platform equilateral triangle is sP.

k-Shape: Efficient and Accurate Clustering of Time Series
www1.cs.columbia.edu2.3 Time-Series Distance Measures The two state-of-the-art approaches for time-series com-parison first z-normalize thesequences andthen use adis-tance measure to determine their similarity, and possibly capture more invariances. The most widely used distance metricisthesimpleED[20]. EDcomparestwotimeseries

Rotation matrix - BrainMaster Technologies Inc.
brainm.comAug 04, 2011 · Rotation matrix From Wikipedia, the free encyclopedia In linear algebra, a rotation matrix is a matrix that is used to perform a rotation in Euclidean space. For example the matrix rotates points in the xy-Cartesian plane counterclockwise through an angle θ about the origin of the Cartesian coordinate system. To perform the rotation, the position of each point must be …

Euclidean Distance Matrix - Stanford University
ccrma.stanford.eduEUCLIDEAN DISTANCE MATRIX Wıκımization [439].) Having found equivalent matrix criteria, we will see there is a bridge from bounded convex polyhedra to EDMs in § 5.9.5.6 Now we develop some invaluable concepts, moving toward a link of the Euclidean metric properties to matrix criteria. 5.4 EDM definition

Problems and Solutions in Matrix Calculus
issc.uj.ac.zaMatrix Calculus by Willi-Hans Steeb ... Rn n-dimensional Euclidean space space of column vectors with nreal components ... of M have Hamming distance n=2. The Hamming distance between two vectors is the number of entries at which they di …

Solution 1. Solution 2. Solution 3.
math.berkeley.eduMath 140. Solutions to homework problems. Homework 1. Due by Tuesday, 01.25.05 1. Let Dd be the family of domains in the Euclidean plane bounded by the smooth curves ∂Dd equidistant to a bounded convex domain D0.How does the perimeter Length(∂Dd) depend on the distance d between ∂Dd and D0? Solution 1.

Derivation of the Lorentz Transformation
www2.physics.umd.eduThe derivation can be compactly written in matrix form. However, for those not familiar with matrix notation, I also write it without matrices. ... (24) and (25) describe a Euclidean space-time and preserve the space-time distance: (x0) 2+ (˙t0)2 = x + (˙t)2. 4.

17. Inner product spaces - MIT Mathematics
math.mit.eduEuclidean distance. De nition 17.3. Let V be a real vector space. A norm on V is a function k:k: V ! R; what has the following properties kkvk= jkjkvk; for all vectors vand scalars k. positive that is kvk 0: non-degenerate that is if kvk= 0 then v= 0. satis es the triangle inequality, that is ku+ vk kuk+ kvk: Lemma 17.4. Let V be a real inner ...

Algorithms for Non-negative Matrix Factorization
proceedings.neurips.ccusing some measure of distance between two non-negative matrices A and B . One useful measure is simply the square of the Euclidean distance between A and B [13], IIA -BI12 = L(Aij - Bij)2 ij This is lower bounded by zero, and clearly vanishes if and only if A = B . Another useful measure is D(AIIB) = 2: ( Aij log k· B:~ - Aij + Bij ) "J (2) (3)