Example: dental hygienist
Euclidean Distance Matrix - Stanford University
EUCLIDEAN DISTANCE MATRIX Wıκımization [439].) Having found equivalent matrix criteria, we will see there is a bridge from bounded convex polyhedra to EDMs in § 5.9.5.6 Now we develop some invaluable concepts, moving toward a link of the Euclidean metric properties to matrix criteria. 5.4 EDM definition
Tags:
Information
Domain:
Source:
Link to this page:
Documents from same domain

Matrix Calculus - Stanford University
ccrma.stanford.eduAppendix D Matrix Calculus From too much study, and from extreme passion, cometh madnesse. −Isaac Newton [205, § 5] D.1 Gradient, Directional derivative, Taylor series D.1.1 Gradients Gradient of a differentiable real function f(x) : RK→R with respect to its vector argument is defined uniquely in terms of partial derivatives ∇f(x) ,

Virtual Flute - CCRMA
ccrma.stanford.eduVirtual Flute REALSIMPLE Project∗ Edgar J. Berdahl and Julius O. Smith III Center for Computer Research in Music and Acoustics (CCRMA), …

Introduction to Digital Audio - CCRMA
ccrma.stanford.edu1 Introduction to Digital Audio Before the development of high-speed, low-cost digital computers and analog-to-digital conversion circuits, all recording and manipulation of sound was done using analog techniques.

LUSH: An Organic Eco+Music System - CCRMA
ccrma.stanford.eduLush can have up to 5 playheads and 2 playqueues simultaneously (figure 4). One green playhead/playqueue are instantiated by default in order to play the built-in synthesizer. In contrast, the rest of playheads and playqueue are designed to send data of …

Flowchart Kitchen - CCRMA
ccrma.stanford.eduFlowchart Kitchen Rego and Sinem Sen Flowchart Kitchen Rego and Sinem Sen. ... (This page is meant to be used as a worksheet. We encourage you to print a copy and track your achievements!) ... (Cookie Baking Step) 56 Power-ups from Level 2 Beef Tacos 34 POWER-UPS Salsa 58 Guacamole 59 Vinaigrette Dressing 60 Pizza Sauce 61 Marinara Sauce 63

The Laplace Transform - CCRMA
ccrma.stanford.eduThe Laplace Transform can also be seen as the Fourier transform of an exponentially windowed causal signal x(t) 2 Relation to the z Transform The Laplace transform is used to analyze continuous-time systems. Its discrete-time counterpart is the z transform:

An introduction to ROC analysis - Stanford University
ccrma.stanford.eduAn introduction to ROC analysis Tom Fawcett Institute for the Study of Learning and Expertise, 2164 Staunton Court, Palo Alto, CA 94306, USA Available online 19 December 2005 Abstract ... sensitivity ¼recall specificity ¼ ...

Sigma-Delta ADCs and DACs - CCRMA
ccrma.stanford.eduarchitectures. The key concepts involved in understand ing the operation of sigma-delta converters are oversampling, noise shaping (using a sigma-delta modulator), digital filtering, and decimation. 0VERSAMPLING The concept of oversampling has been pre viously discussed in Section III, and is illus trated again in Figure 6.2 and 6.3. As was

State Space Models - Stanford University
ccrma.stanford.edusolving the ODE • ODE can be nonlinear and/or time-varying • The sampling interval Tn may be fixed or adaptive 7 State Definition We need a state variable for the amplitude of each physical degree of freedom Examples: • Ideal Mass: Energy = 1 2 mv2 ⇒ state variable =v(t) Note that in 3D we get three state variables (vx,vy,vz ...

Applications of the Gauss-Newton Method
ccrma.stanford.eduThe final values of u and v were returned as: u=1.0e-16 *-0.318476095681976 and v=1.0e-16 *0.722054651399752, while the total number of steps run was 3.It should be noted that although both the exact values of u and v and the location of the points on the circle will not be the same each time the program is run, due to the fact that random points are generated, the program …
Related documents

Problems and Solutions in Matrix Calculus
issc.uj.ac.zaMatrix Calculus by Willi-Hans Steeb ... Rn n-dimensional Euclidean space space of column vectors with nreal components ... of M have Hamming distance n=2. The Hamming distance between two vectors is the number of entries at which they di …

Derivation of the Lorentz Transformation
www2.physics.umd.eduThe derivation can be compactly written in matrix form. However, for those not familiar with matrix notation, I also write it without matrices. ... (24) and (25) describe a Euclidean space-time and preserve the space-time distance: (x0) 2+ (˙t0)2 = x + (˙t)2. 4.

Algorithms for Non-negative Matrix Factorization
proceedings.neurips.ccusing some measure of distance between two non-negative matrices A and B . One useful measure is simply the square of the Euclidean distance between A and B [13], IIA -BI12 = L(Aij - Bij)2 ij This is lower bounded by zero, and clearly vanishes if and only if A = B . Another useful measure is D(AIIB) = 2: ( Aij log k· B:~ - Aij + Bij ) "J (2) (3)

Rotation matrix - BrainMaster Technologies Inc.
brainm.comAug 04, 2011 · Rotation matrix From Wikipedia, the free encyclopedia In linear algebra, a rotation matrix is a matrix that is used to perform a rotation in Euclidean space. For example the matrix rotates points in the xy-Cartesian plane counterclockwise through an angle θ about the origin of the Cartesian coordinate system. To perform the rotation, the position of each point must be …

Solution 1. Solution 2. Solution 3.
math.berkeley.eduMath 140. Solutions to homework problems. Homework 1. Due by Tuesday, 01.25.05 1. Let Dd be the family of domains in the Euclidean plane bounded by the smooth curves ∂Dd equidistant to a bounded convex domain D0.How does the perimeter Length(∂Dd) depend on the distance d between ∂Dd and D0? Solution 1.

17. Inner product spaces - MIT Mathematics
math.mit.eduEuclidean distance. De nition 17.3. Let V be a real vector space. A norm on V is a function k:k: V ! R; what has the following properties kkvk= jkjkvk; for all vectors vand scalars k. positive that is kvk 0: non-degenerate that is if kvk= 0 then v= 0. satis es the triangle inequality, that is ku+ vk kuk+ kvk: Lemma 17.4. Let V be a real inner ...

k-Shape: Efficient and Accurate Clustering of Time Series
www1.cs.columbia.edu2.3 Time-Series Distance Measures The two state-of-the-art approaches for time-series com-parison first z-normalize thesequences andthen use adis-tance measure to determine their similarity, and possibly capture more invariances. The most widely used distance metricisthesimpleED[20]. EDcomparestwotimeseries

MATH 304 Linear Algebra
www.math.tamu.eduThat is, the nullspace of a matrix is the orthogonal complement of its row space. Proof: The equality Ax = 0 means that the vector x is orthogonal to rows of the matrix A. Therefore N(A) = S⊥, where S is the set of rows of A. It remains to note that S⊥= Span(S)⊥= R(AT)⊥. Corollary Let V be a subspace of Rn. Then dimV +dimV⊥ = n.
The Delta Parallel Robot: Kinematics Solutions Robert L ...
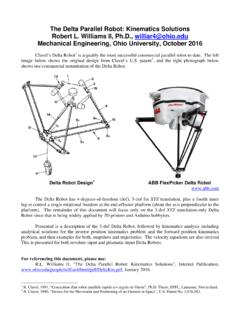
www.ohio.edu4 The three-dof Delta Robot is capable of XYZ translational control of its moving platform within its workspace. Viewing the three identical RUU chains as legs, points Bii,1,2,3 are the hips, points Aii,1,2,3 are the knees, and points Pii,1,2,3 are the ankles.The side length of the base equilateral triangle is sB and the side length of the moving platform equilateral triangle is sP.