Transcription of Discrete-time signals and systems
1 Chapter2 discrete -timesignalsandsystemsContentsOv erview.. cationofdiscrete-timesignals.. cationofdiscrete-timesystems.. Amplitude properties.. :theconvolutionsum.. andnonrecursive discrete -timesystems.. cientdifferenceequations.. cientdifferenceequations.. LTIrecursive system.. andnonrecursive realizationofFIRsystems.. J. Fessler, May27,2004,13:10(studentversion)Overview terminology, classesofsignalsandsystems,linearity,tim e-invariance. impulseresponse,convolution,differenceeq uations,correlation, :eventuallyDSPsystemdesign;must rstlearntoanalyze!
2 :single-channel,continuous-valuedsignals ,namely1 Ddiscrete-timesignalsx[n].Inmathematical notationwewritex:Z!Rorx:Z!C x[n]canberepresentedgraphicallyby stem plot. x[n]isnotde nedfornonintegern. (Itis not zero despiteappearanceofstemplot.) We callx[n] willalsoconsider2 Ddiscrete-spaceimagesx[n; m]. (importantexamples) unitsamplesequenceorunitimpulseorKroneck erdeltafunction(muchsimplerthantheDiraci mpulse)Centered: [n] = 1; n= 00; n6= 0 Shifted: [n k] = 1; n=k0; n6=kPicture unitstepsignalu[n] = 1; n 00; n <0=f: : : ;0;0;1;1; : : :gUsefulrelationship: [n] =u[n] u[n 1].
3 Thisis thediscrete-timeanalogofthecontinuous-ti mepropertyofDiracimpulses: (t) =ddtu(t). exponentialsignalorgeometricprogression( discrete -timeanalogofcontinuous-timeeat) x[n] =anplotfor0< a < : 2D[n; m] = [n] [m] = 1; n= 0; m= 00; graphically. Hereare ve (!) [n] =f: : : ;0;0;2;1;1; : : :g=u[n] + [n] = 2 [n] + [n 1] + [n 2] + = 2 [n] +1Xk=1 [n k] =8<:2; n= 0;1; n 1;0; n <0:Fora 4-periodicsignalwemaywritef1;0;7;5g4tode notethesignalf: : : ;1;0;7;5;1;0;7;5;1;0; : : :Chooserepresentationmostappropriatefora givenproblem.(Thereareperhapsmoreviableo ptionsthanforCTsignals.)
4 Example:x[n] =f1;0;0;1=2;0;0;1=4;0; : : :g= [n 0] +12 [n 3] +14 [n 6] + =1Xk=0 12 k [n 3k]:InMATLAB youhave two basicchoices. Enumeration:xn = [0 0 1 0 3];whichtypicallymeansx[n] = [n 2] +3 [n 5]c J. Fessler, May27,2004,13:10(studentversion) Signalsynthesis:n = [-5:4];x = cos(n);whichmeansx[n] = cos(n)for 5 n 4(andx[n]isunspeci edoutsidethatrange).Theinlinefunctionis alsouseful, , theunitimpulseis:imp = inline('n== 0', 'n');Skill:Ef signalis thesetoftimessuchthatthesignalis oftenabbreviateandsaysimplysupportorinte rvalinsteadofsupportinterval.
5 Morepreciselythesupportinterval ofa continuous-timesignalxa(t)is thesmallesttimeinterval1[t1; t2]suchthatthesignaliszerooutsidethisint erval. Fora discrete -timesignalx[n], thesupportinterval is a setofconsecutive integers:fn1; n1+ 1; n1+ 2; : : : ; n2g. Speci cally,n1is thelargestintegersuchthatx[n] = 0foralln < n1, andn2is thesmallestintegersuchthatx[n] = 0foralln > signalis thelengthofitssupportinterval. Forcontinuous-timesignals,duration=t2 t1. Whatis thedurationof a discrete -timesignal?duration=n2 n1+ nitedurationandothershave in Thesignalx[n] =u[n 3] u[n 7] + [n 5] + [n 9]hassupportf3;4; : : : ; (a; b),closedasin[a; b], orhalf-open,half-closedasin(a; b]and[a; b).
6 Forcontinuous-timesignals,in almostallcasesofpracticalinterest,it is notnecessarytodistinguishthesupportinter val J. Fessler, May27,2004,13:10(studentversion) cationofdiscrete-timesignalsTheenergyofa discrete -timesignalis de nedasEx4=1Xn= 1jx[n]j2:Theaveragepowerofa signalis de nedasPx4= limN!112N+ 1 NXn= Njx[n]j2: IfEis nite(E <1) thenx[n]is calledanenergysignalandP= 0. IfEis in nite,thenPcanbeeither niteorin niteandnonzero,thenx[n]is Considerx[n] = 5(aconstantsignal).ThenP= limN!112N+ 1 NXn= N52= limN!152= 25:Sox[n]is a [n]anenergysignal?
7 SincePis nonzero,Eis in cations x[n]isperiodicwithperiodN2 Niffx[n+N] =x[n]8n Otherwisex[n]isaperiodicFact:N-periodics ignalsarepowersignalswithP=1 NPN 1n=0jx[n]j2:Symmetry x[n]issymmetricoreveniffx[ n] =x[n] x[n]isantisymmetricoroddiffx[ n] = x[n]We candecomposeany signalintoevenandoddcomponents:x[n] =xe[n] +xo[n]xe[n]4=12(x[n] +x[ n])Verifythatthisis even!xo[n]4=12(x[n] x[ n])Verifythatthisis odd! [n] =12(2u[n] +2u[ n]) +12(2u[n] 2u[ n]) = (1 + [n]) + (u[n 1] u[1 n])f: : : ;0;0;2;2;2; : : :g=f: : : ;1;1;2;1;1; : : :g+f: : : ; 1; 1;0;1;1; : : : Amplitudemodi cations amplitudescalingy[n] =a x[n], amplitudeshifty[n] =x[n] +b sumoftwo signalsy[n] =x1[n] +x2[n] productoftwo signalsy[n] =x1[n]x2[n] Timemodi cations Timeshiftingy[n] =x[n k].
8 Kcanbepositive (delayedsignal)ornegative (advancedsignal)if signalstoredina computer Foldingorre ectionortime-reversaly[n] =x[ n] time -scalingordown-samplingy[n] =x[2n]. (discardeveryothersample)( (t) =g(2t))Why? , toreduceCPUtimeina preliminarydataanalysis, J. Fessler, May27,2004,13:10(studentversion) [n]andy[n]isrxy[l]4=1Xn= 1x[n]y [n l] =1Xn= 1x[n+l]y [n];l= 0; 1; 2; : : : ;wherelis calledthelag. Recipeis almostthesameasforconvolution:shift,mult iply, !Exampleapplications: time -delayestimatio n,frequency estimation.(A1999 MercedesBenzhascruise-controlthattracksc arinfront.)
9 Rxy[l] =r yx[ l](calledconjugatesymmetryorHermitiansym metry) rxy[l] =x[l] y [ l] jrxy[l]j pExEywhereEx=P1n= 1jx[n]j2is thesignalenergy. Thisis calledtheCauchy-Schwarzinequality. Ifw[n] = x[n]thenrwy[l] = rxy[l]skipProofforrealsignals:0 1Xn= 1 x[n]pEx y[n l]pEy 2=1Ex1Xn= 1jx[n]j2+1Ey1Xn= 1jy[n l]j2 2pExEy"1Xn= 1x[n]y[n l]#= 2 2rxy[l]pExEy:Thus pExEy rxy[l] pExEy:AutocorrelationTheautocorrelationo fa signalis thecrosscorrelationofthesignalwithitself :rxx[l]4=1Xn= 1x[n]x [n l] =1Xn= 1x[n+l]x [n]; l= 0; 1; 2; : : : :It : jrxx[l]j rxx[0] rxx[0] = J.
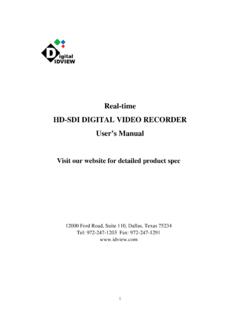
10 Fessler, May27,2004,13:10(studentversion)02040608 0 1 (n)Noiseless Periodic Signal x(n) 100 50050100 100 50050100lrxx(l)Autocorrelation rxx(l) of a Noiseless Periodic Signal020406080 4 2024ny(n)Noisy Periodic Signal y(n) 100 50050100 150 100 50050100150200lryy(l)Autocorrelation ryy(l) of a Noisy :Exampleofautocorrelationofa periodicsignalwitha noisysignalhavingthesamedominantfrequenc y J. Fessler, May27,2004,13:10(studentversion) a deviceoralgorithmthat,accordingtosomewel l-de nedrule,operatesona ,a systemis alsoafunction. Theinputsignalx[n]istransformedbythesyst emintoa signaly[n], whichweexpressmathematicallyasy[ ] =Tfx[ ]gory[n] =Tfx[ ]g[n]orx[ ]T!