Transcription of WORKING WITH STEPPER MOTORS - robotoid.com
1 In past chapters we ve looked at powering robots using everyday continuous DC MOTORS are cheap, deliver a lot of torque for their size, and are easily adaptable to avariety of robot designs. By their nature, however, the common DC motor is rather impre-cise. Without a servo feedback mechanism or tachometer, there s no telling how fast a DCmotor is turning. Furthermore, it s difficult to command the motor to turn a specific num-ber of revolutions, let alone a fraction of a revolution. Yet this is exactly the kind of preci-sion robotics work, particularly arm designs, often the STEPPER motor .
2 STEPPER MOTORS are, in effect, DC MOTORS with a twist. Insteadof being powered by a continuous flow of current, as with regular DC MOTORS , they are dri-ven by pulses of electricity. Each pulse drives the shaft of the motor a little bit. The morepulses that are fed to the motor , the more the shaft turns. As such, STEPPER MOTORS are inher-ently digital devices, a fact that will come in handy when you want to control your robotby computer. By the way, there are AC STEPPER MOTORS as well, but they aren t really suit-able for robotics work and so won t be discussed MOTORS aren t as easy to use as standard DC MOTORS , however, and they re bothharder to get and more expensive.
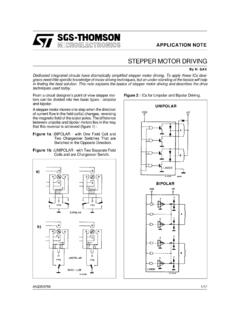
3 But for the applications that require them, steppermotors can solve a lot of problems with a minimum of fuss. Let s take a closer look at step-pers and learn how to apply them to your robot with STEPPER MOTORS279 FromRobot Builder s Bonanza, 2nd Edition. for more. 2001 Inside a STEPPER MotorThere are several designs of STEPPER MOTORS . For the time being, we ll concentrate onthe most popular variety, the four-phase unipolar STEPPER , like the one in Fig. Aunipolar STEPPER motor is really two MOTORS sandwiched together, as shown in Fig. motor is composed of two windings.
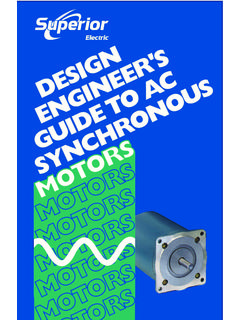
4 Wires connect to each of the four windingsof the motor pair, so there are eight wires coming from the motor . The commons fromthe windings are often ganged together, which reduces the wire count to f ive or sixinstead of eight (see Fig. ).WAVE STEP SEQUENCEIn operation, the common wires of a unipolar STEPPER are attached to the positive (some-times the negative) side of the power supply. Each winding is then energized in turn bygrounding it to the power supply for a short time. The motor shaft turns a fraction of a rev-olution each time a winding is energized.
5 For the shaft to turn properly, the windings mustbe energized in sequence. For example, energize wires 1, 2, 3, and 4 in sequence and themotor turns clockwise. Reverse the sequence, and the motor turns the other SEQUENCEThe wave step sequence is the basic actuation technique of unipolar STEPPER , and far better, approach actuates two windings at once in an on-on/off-off four-step sequence, as shown in Fig. This enhanced actuation sequence increases the dri-ving power of the motor and provides greater shaft rotation are other varieties of STEPPER MOTORS , and they are actuated in different ways.
6 Oneyou may encounter is bipolar. It has four wires and is pulsed by reversing the polarity ofthe power supply for each of the four steps. We will discuss the actuation technique forthese MOTORS later in this Considerations of StepperMotorsStepping MOTORS differ in their design characteristics over continuous DC MOTORS . Thefollowing section discusses the most important design specif ications for PHASINGA unipolar STEPPER requires that a sequence of four pulses be applied to its various wind-ings for it to rotate properly. By their nature, all STEPPER MOTORS are at least are four-phase; some are six-phase.
7 Usually, but not always, the more phases in amotor, the more accurate it WORKING with STEPPER MOTORSSTEP ANGLES tepper MOTORS vary in the amount of rotation of the shaft each time a winding is amount or rotation is called thestep angleand can vary from as small as ( is morecommon) to 90 . The step angle determines the number of steps per revolution. A STEPPER witha step angle, for example, must be pulsed 200 times for the shaft to turn one complete rev-olution. A STEPPER with a step angle must be pulsed 48 times for one revolution, and so CONSIDERATIONS OF STEPPER MOTORS 281 FIGURE typical unipolar STEPPER (shaft)Stator cupStator cup 2 CoilCoilFIGURE a unipolar STEPPER motor .
8 Note the two setsof coils and stators. The unipolar STEPPER is reallytwo MOTORS sandwiched RATEO bviously, the smaller the step angle is, the more accurate the motor . But the number ofpulses STEPPER MOTORS can accept per second has an upper limit. Heavy-duty steppers usu-ally have a maximum pulse rate (or step rate) of 200 or 300 steps per second, so they havean effective top speed of one to three revolutions per second (60 to 180 rpm). Some small-er steppers can accept a thousand or more pulses per second, but they don t usually pro-vide very much torque and aren t suitable as driving or steering that STEPPER MOTORS can t be motivated to run at their top speeds immediately froma dead stop.
9 Applying too many pulses right off the bat simply causes the motor to freezeup. To achieve top speeds, you must gradually accelerate the motor . The acceleration can282 WORKING with STEPPER MOTORSP hase 1 Phase 2 Phase 3 Phase 4 GroundGroundSTEP PHASE 1 PHASE 2 PHASE 3 PHASE 41234 OFF ONCounterclockwiseClockwiseFIGURE wiring diagram of the unipolar common connections can be separate enhanced on-on/off-off four-step sequenceof a unipolar STEPPER quite swift in human terms. The speed can be one-third for the first few milliseconds,two thirds for the next few milliseconds, then full blast after TORQUES teppers can t deliver as much running torque as standard DC MOTORS of the same size andweight.
10 A typical 12-volt, medium-sized STEPPER motor may have a running torque of only25 oz-in. The same 12-volt, medium-sized standard DC motor may have a running torquethat is three or four times , steppers are at their best when they are turning slowly. with the typical STEPPER ,the slower the motor revolves, the higher the torque. The reverse is usually true of continuousDC MOTORS . Fig. shows a graph of the running torque of a medium-duty, unipolar 12-voltstepper. This unit has a top running speed of 550 pulses per second. Since the motor has a stepangle of , that results in a top speed of revolutions per second (165 rpm).