Transcription of Hobby Servo Fundamentals - Princeton University
1 HOBBYHOBBYHOBBYHOBBYSERVOSERVOSERVOSERVO FUNDAMENTALSFUNDAMENTALSFUNDAMENTALSFUND AMENTALSBY: DARREN SAWICZINTRODU CTION obby servos are a popular andinexpensive method of motioncontrol. They provide an off-the-shelfs olution for m os t of the R/C androbotic hobbyist's needs. Hobbyservos eliminate the need to customdesign a control system for eachapplication. Without Hobby servos(hereafter referred to only as servos)you would have to: design a control system analyze the transient response fin e tune the feedback loop determine the proper gear ratio for thedesired speed or e ffi ciency choose a motor build the mechanical sections build the amplifier and motor driver try to make it fit inside what ever you'retrying to control!
2 Although servos are very common,technical information is hard to comeby. A search of the Internet will bringup bits and pieces but it is hard tolocate a s ingle s ource for all theinformation. In this document I willattempt to provide all the informationyou would need to hack a Servo ormake your VO BASI CShroughout this document I will beusing the Tower Hobbies TS-53servo to describe how servos servos may be a different sizeor have metal gears or bearings butthe basic concept of operation is the early 1990's servos haveused a de-facto standard pulse widthmodulation technique to control thepos ition of the output shaft. Thepulse is fed to the Servo via a controlline.
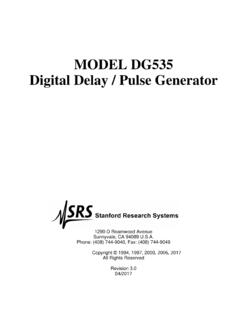
3 The control line does not supplypower to the motor directly it is aninput to a control chip inside theservo and as such it does not haveto s upply m uch current to the s if you are designing aservo controller you may use justabout any technology (CMOS, TTL,Discreet Components) to drive thecontrol isalsoused asthegroundfor areonlythreewires,manufacturers haven't standardizedthe pinouts. Most connectors arewired the same but there areHTFIGURE 1: Servo CONTROL TIMING1ms (MinimumRequired Time)The Servo is positioned to the Servo ispositioned to theextreme Servo is like the Airtronicsconnector where the power andground wire is reversed. Connectinga Servo that is wired incorrectly canblow your Servo or fry the receiver servos can be rewired simplyby lifting the plastic tab holding thepin into the connector, pulling the pinout the back, and reinserting the pinsin the proper power wire carries the majorityof the current to the motor.
4 Thecurrent varies from almost nothing( for the TS-53) when theservo isn't receiving any controlsignals, to a maximum current whenthe Servo is fully loaded (600mA forthe TS-53).The receiver regulates the voltageon the power wire when it is usedwith R/C equipment. The servos donot get the full voltage of the batterypack. Applying more than 5 Volts tothe servos can damage you were trying to i mplementthe timing from amicrocontroller you could use aregister to hold a 0 to 100%PWM sig nal and tack it on tothe end of a 1ms- delay routineELECTRICAL SIGNALSAt first glance the ele ctrical sig nalsused to control servos seem overlycomplex. When you consider thatone signal line is presenting theservo with digital direction andproportion information you start tosee the elegance of the ele gance comes at a price forthe poor hobbyist with litt le or noback ground in electroni cs.
5 You can'tjust hook it up to a batt ery and watchit go (unless you modify the Servo todo just that). There are howevercircuits which allow you to control aservo without using a recei ver. Letslook at the sig nal we need vol tage on the control lineshould be 0 Vol ts for a low signal(logic 0) and 5 Vol ts for a high sig nal(logic 1). The vol tage to the controlline should be applied through a 10kresistor to limit the curr ent in casesomething FIGURE 1 you can see the timingrelationship between the pulse widthand Servo Servo 's control logic needs tosee at least a one millisecond pulsebefore the actual pulse widthmodulated (PWM) control part of the signal isbroken down into the 1ms minimumtime, the 1ms PWM signal, and aroughly 40ms delay .
6 This delay is notas critical as the other parts of thetim ing s ignal. It is ess entially thedead time between control signals. Ifyou repeat the control signals tooquickly ( 10ms delay ) the servowill buzz and jitter. If you repeat thecontrol signals too slow ( 70msdelay) the Servo will shut off betweensignals and its position will notremain the case of R/C equipment thisdead time is used by the transmitterto transmit the other channels. If thechannels were placed back-to-backthere would be enough room forapproximately 20 channels beforeyou would have to transmit the firstchannel receiver demultiplexes thereceived pulses and puts one pulseon each output.
7 The rising edge ofeach pulse is the start of a is important to note that the"channels" of a two or four, transmitter, are notseparated by frequency like radio orTV stations (Frequency DivisionMultiplexed), they are pulses on thesame radio channel separated onlyby time (Time Division Multiplexed).The only way you can change theradio channel you are on is toreplace the you are designing a multi-channelcontroller you will soon discover thatbecause the PWM portion of thesignal is variable you will have aNOTE: If you are custom buildinga wireless transmitter the 40mSrepeat time is required to complywith FCC and DOC bandwidthlimitations. The sidebandsgenerated by the FM modulationcannot extend into length delay time.
8 Forexample:You design an eight-channel fixed time component is 1ms x 8channels = 8ms. T he variable PWMsignal can vary between 0ms x 8channels = 0ms when they are all fullycounter clockwise, to 1ms x 8 channels= 8ms when they are all fullyclockwise. T his adds up to between 8msand 16ms depending on the positions ofthe you were trying to have a constantrepetition rate of 40ms you wouldneed to change the dead timeaccordingly. With a microcontrolleryou could add up all the constanttime plus all the variable time ands ubtract it from 40ms to calculate thedead time. This takes time and usesup the microcontroller's resourcesneedlessly.
9 The dead time is notwritten in stone. It does not have tobe the same each CIRCUITSS ervos have their own proprietarycircuitry built inside the Servo circuitry consists of a pulsewidth comparator, which comparesthe incoming signal from the receiverwith a one-shot timer whose perioddepends on the resistance of apotentiometer connected to thes ervo's drive s haft. This feedback iswhat provides the stability for thecontrol circuitry. The differencebetween the control signal and thefeedback signal is the error error signal is used to control aflip-flop that toggles the direction thecurrent flows through the motor. Theoutputs of the flip-flop drive an H-Bridge circuit that handles the highcurrent going through the you were going to try to build acircuit to take a PWM signal andconvert it to a motor position, you'dprobably end up with a fairly largecircuit.
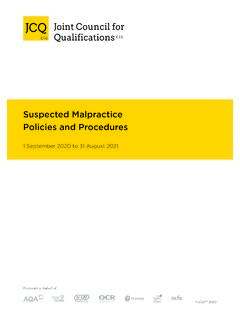
10 A microcontroller would dothe job but if you can't programyou're back to square there is a chip availablewhich does the work for you. TheM51660L Servo motor control chipfrom Mitsubishi contains all theelectronics needed to decode thesignal and control a you supply are two PNPtransistors for the upper half of theH-bridge and a handful of resistorsand capacitors. A complete circuit isgiven on the second last page oftheir data sheet:BLOCK DIAGRAM111391238714 Supply( )GND5 InputControl logic circuitFlip-flop461012 Output drivecircuitStretcher inputError pulse outputTiming capacitanceServo position voltage inputOne-shot multivibratorPulse stretcherVoltage regulatingcircuitExternal PNP transistor drive (1)Output (1)Output (2)External PNP transistor drive (2)Regulated voltage outputVCCT iming APPLICATION EXAMPLES ervo motor control circuit for radio-controlled141311953112108642 MVCC10 18kUnitResistanceCapacitance.