Transcription of DC-DC Converters Feedback and Control
1 DC-DC Converters Feedback and Feedback generalities Conditions for stability Poles and zeros Phase margin and quality coefficient Undershoot and crossover frequency Compensating the converter Compensating with a TL431 Watch the optocoupler! Compensating a DCM flyback Compensating a CCM flyback Simulation and bench results Feedback generalities Conditions for stability Poles and zeros Phase margin and quality coefficient Undershoot and crossover frequency Compensating the converter Compensating with a TL431 Watch the optocoupler!
2 Compensating a DCM flyback Compensating a CCM flyback Simulation and bench results is Feedback ? A target is assigned to one or several state-variables, Vout= 12 V. A circuitry monitors Voutdeviations related to Vin, Iout, T etc. If Voutdeviates from its target, an error is created and fed-backto the power stage for action. The action is a change in the Control variable: duty-cycle (VM), peak current (CM) or the switching voltageVinDC-DCOutput voltageVoutcontrolactionCompensating for the converter shortcomings!
3 VoutRthVthInput Feedback Implementation Voutis permanently compared to a reference voltage Vref. The reference voltage Vrefis precise and stable over temperature. The error, , is amplified and sent to the Control input. The power stage reacts to reduce as much as it = +-+-VinVoutRupperRlowerError amplifier - GVrefModulator - GPWMdPower stage - HVp +-+-VinVoutRupperRlowerError amplifier - GVrefModulator - GPWMdPower stage - HVp Feedback generalities Conditions for stability Poles and zeros Phase margin and quality coefficient Undershoot and crossover frequency Compensating the converter Compensating with a TL431 Watch the optocoupler!
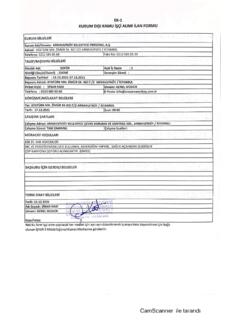
4 Compensating a DCM flyback Compensating a CCM flyback Simulation and bench results or Negative Feedback ?H(s)Vin(s)Vout(s)+ Do we want to build an oscillator? ()()()() ()()0lim1inoutinVsHsVsVsGsH s = + To sustain self-oscillations, as Vin(s)goes to zero, quotient must go infinite= 1 Sign is neg for: = -180 ()()()() ()1outinVsHsVsHsGs=+Open-loop gain T(s)G(s)The Plant Error in for Oscillations when the open-loop gain equals 1 (0 dB) cross over point total rotation is -360 : -180 for H(s)and -180 for G(s) we have self-sustaining oscillating conditionsLoop gain |H(s)|Loop phase argH(s)-180 0 dBGain is 1atfc = -180 Total phase delay atfc.
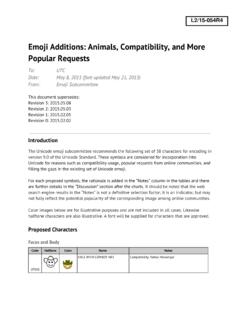
5 -180 H(s)power stage-180 G(s)opamptotal = -360 Need for Phase Margin we needphasephasemargin whenT(s)= 0 dB we needgaingainmargin when argT(s)= -360 gainmarginPhase margin:The margin before the loopphase rotation argT(s)reaches -360 atT(s)= 0 dBGain margin:The margin before the loopgain T(s)reaches 0 dB at afreq. where argT(s)= -360 CrossoverfrequencyfcT(s)= 0 db(volts) in degreesPlot1210 0 dBargT(s)= -360 T(s) Feedback generalities Conditions for stability Poles and zeros Phase margin and quality coefficient Undershoot and crossover frequency Compensating the converter Compensating with a TL431 Watch the optocoupler!
6 Compensating a DCM flyback Compensating a CCM flyback Simulation and bench results and Zeros A plant (power stage) loop gain is defined by:()()()NsHsDs= solving for N(s)= 0, the roots are called the zeroszeros solving for D(s)= 0, the roots are called the polespoles()()()5301sks kHssk++=+numeratordenominator1215301zzps ksksk= = = ======Two zerosOne and Zeros A polelagsthe phase by -45 at its cutoff frequency0()11() 11outinVssVssRC ==++R21kC110nFV1AC = 1 VinVout01RC =-90 delayfor f = atcutoffCutoff frequency-3 dB-1 slope-20 dB/decade|Vout(s)|argVout(s) and Zeros A zerobooststhe phase by +45 at its cutoff frequency0()
7 1sGs =+ db(volts)Plot101101001k10k100kfrequency in in db(volts)Plot101101001k10k100kfrequency in in degreesPlot22101001k10k100k1 Meg10 Megfrequency in in db(volts)plot101101001k10k100k1 Meg10 Megfrequency in degreesplot22101001k10k100k1 Meg10 Megfrequency in in db(volts)plot101101001k10k100k1 Meg10 Megfrequency in degreesplot2201RC =00()() 11outinsVssRCsVssRC ==++The general form of a zero:R21kC110nFV1AC = 1 VinVoutCutoff frequency-3 dB+1 slope+20 dB/decade+45 atcutoff+45 atcutoff+1 slope+20 dB/decadeCutoff frequency-3 dB0 0 90 90 |Vout(s)|argVout(s)|Vout(s)|argVout(s) Right Half-Plane Zero In a CCM boost, Ioutis delivered during the off time: ()1outdLIII D== TswD0 TswId(t)tIL(t)inVLId0 TswD1 TswId(t)tIL(t) dIL1inVLId1IL0 If Dbrutallyincreases, D'reduces and Ioutdrops!
8 What matters is the inductor current slew-rate Occurs in flybacks, buck-boost, Cuk etc.()LdV Right-Half-Plane-Zero With a RHPZ we have a boostin gain but a lagin phase! in db(volts)Plot111101001k10k100k1 Megfrequency in in degreesPlot22|Vout(s)|argVout(s)-90 +1 slope+20 dB/decade0() 1sGs =+LHPZRHPZ0() 1sGs = Feedback generalities Conditions for stability Poles and zeros Phase margin and quality coefficient Undershoot and crossover frequency Compensating the converter Compensating with a TL431 Watch the optocoupler!
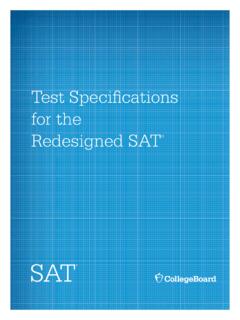
9 Compensating a DCM flyback Compensating a CCM flyback Simulation and bench results much Margin? The RLCF ilter let us study an RLClow-pass filter, a 2ndorder system23R1{R}1L1{L}C1{C}Voutparametersf0 =235kL=10uC=1/(4* ^2*f0^2*L)w0=({L}*{C})^ ((({C}/(4*{L}))^ )*2*{Q})Vin()211 TsLCsRCs=++()222211211rrrrTsssssQ ==++ ++1rLC =4 CRL =12Q =zeta rresonant freq. damping factorQ quality RLC Response to an Input Step changingQaffects the transient #6, vout#5, vout#4, vout#3, vout in voltsPlot17891011Q= 1Q= 5 Fast response and no overshoot!
10 Q< over dampingQ= critical dampingQ> under dampingOvershoot = 65% Asymptotically is the Analogy withT(s)? in the vicinity of the crossover point, T(s)combines: one pole at the origin, 0and one high frequency pole, 29 Link the closed-loopresponse to the open-loopphase margin:()0211 Tsss = + in db(volts) in degrees210 0 dB-2-1()()2020111 TsssTs =+++()()22111rrTsssTsQ =+++(OL)(CL)Link open-loop mwith closed-loop QClose theloopT(s) Open-Loop m a Qfactor of (critical response) implies a mof 76 a 45 mcorresponds to a Qof : oscillatory response!